
NA robot je elektromechanický stroj který je řízen obvody nebo počítačovým programem. Roboti si vyměnili lidi za účelem provádění nepřetržitých a nebezpečných úkolů, které se lidé rozhodnou nedělat. Současnost, dárek roboty jsou rozděleny do různých kategorií na základě jejich vlastností a výkonu, jako jsou průmyslové roboty, komerční roboty, servisní roboty, mobilní roboty. Zde je servisní robot, který provádí nepřetržité úkoly, aby přivítal lidi pohybem ruky představujícím „Namaste“ prostřednictvím zaznamenané hlasové zprávy. Obecně platí, že když zveme lidi domů, na večírky, do sňatků, do kanceláře atd. Musíme zajistit osobu, aby je pozdravila a pozvala je ke vstupu. Pokud je počet lidí nízký, pak je úkol jednodušší. Ale pokud pozdravíte stovky lidí, pak je úkol obtížný. K překonání tohoto problému je zde projekt, jmenovitě namaste robot s hlasovým ovládáním.

Namaste Robot
Namaste Robot s hlasovým ovládáním
Hlavní koncept tohoto Namaste robotickým projektem je ovládání různých servomotorů přes desku Arduino. Tento robot skenuje okolní lidi a otáčí hlavou o 180 °. Pokud rozpozná někoho v okolí, pak si přeje, aby osoba s Namaste oběma rukama stiskla k sobě. Je to tradiční způsob, jak si přát lidi v Indii. The aplikace robotů zapojit do nákupních center, parků, kanceláří přilákat lidi.
Blokové schéma robota Namastae s hlasovým ovládáním
Následující obrázek označuje blokové schéma robota Namaste s hlasovým ovládáním. U tohoto druhu robota jsou programovány hlasové příkazy. Celá vývojová deska může být připojena ke společnému zdroji napájení. Popis každého bloku je následující. The zdroj napájení dodává napájení všem modulům. Tyto moduly vyžadují proud v mA a provozní napětí bude 5V.

Blokové schéma robota Namastae s hlasovým ovládáním
Deska Arduino
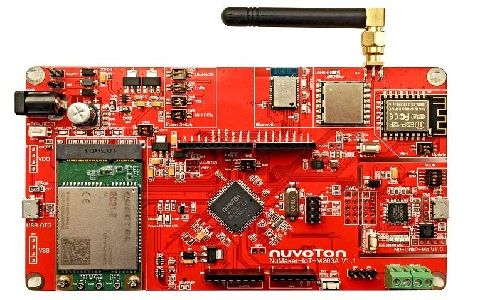
Arduino je jeden druh nástroje založené na jednoduché desce mikrokontroléru používané k ovládání a snímání fyzického světa než stolní počítač. Pro fyzické výpočty jsou k dispozici různé platformy mikrokontrolérů. Důležité vlastnosti Arduina jsou levný, otevřený a rozšiřitelný software. Software Arduino je k dispozici jako nástroj s otevřeným zdrojovým kódem a jazyk lze rozšířit prostřednictvím knihoven C ++.

Deska Arduino
Senzor Ping
Ping senzor používá SONAR k ovládání vzdálenosti objektu v jeho blízkosti. Tento senzor se používá jako oči robota, aby snímaly překážku, například senzor přiblížení. Poskytuje vynikající přesnost rozsahu a stabilní hodnoty. Na činnost tohoto snímače nemá vliv černý materiál ani sluneční světlo. Specifikace senzoru ping jsou napětí 5 V, proud 15 mA, úhel senzoru NENÍ> = 15 a detekční vzdálenost 2 cm ~ 450 cm.

Senzor Ping
Níže je uvedeno propojení pingového senzoru s Arduinem. K dispozici jsou čtyři piny pro propojení senzoru ping s deskou Arduino. Čtyři piny na desce Arduino jsou GND, VCC, ECHO a TRIGGER. Piny na desce jsou D0-D13, takže 12 a 13 pinů jsou vstupní a výstupní piny.
Mikrokontrolér Arduino nám nabízí knihovnu servořízení, která nám umožňuje snadno přepínat serva. V tomto projektu jsme použili 5 serv k regulaci pohybů robota Namaste jako hlava, pravý loket, levý loket, pravé rameno a levé rameno. Zde digitální kolíky vstupu / výstupu (D5, D6, D9, D10, D1) znamenají, že jsou na desce Arduino propojeny se servomotory.
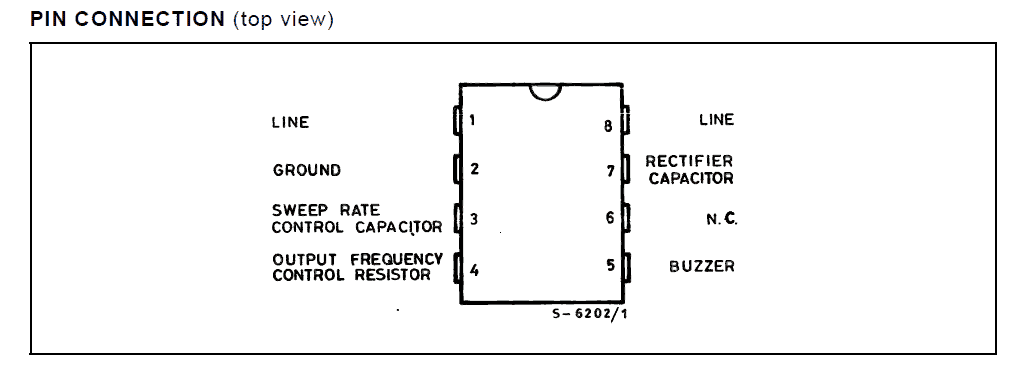
Hlasové přehrávání IC
Toto IC pro přehrávání hlasu nabízí nahranou zprávu, která se přehrává s předdefinovanou frekvencí. Přehrávání se přesune do zvukové zesilovací jednotky.

Hlasové přehrávání IC
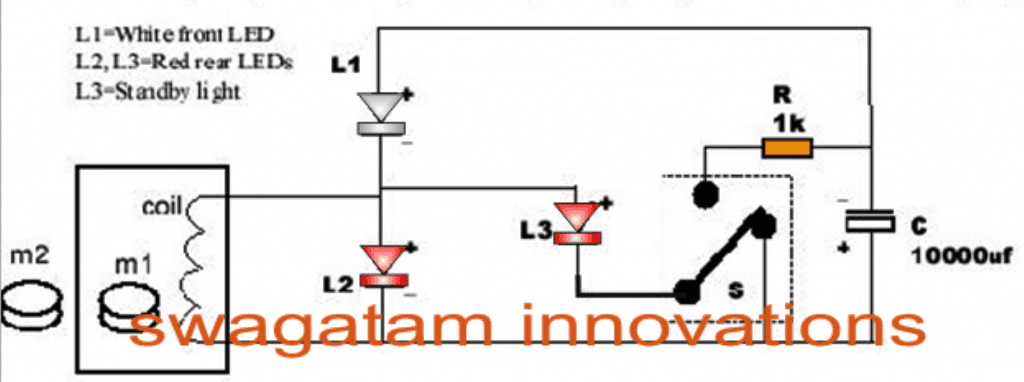
Relé
NA relé je jeden druh spínače pracuje elektricky. Tok proudu cívkou relé vytváří magnetické pole, které vyvolává páku a mění spínací kontakty.

Relé
Robot Namastae s hlasovým ovládáním pracuje
Práce robota Namaste může být prováděna krok za krokem spolu se simulovanými výsledky. Když je robot Namaste v prvním stavu, pak servomotor s robota 2, 3, 4, 5 jsou ve vypnutém stavu nebo ve stavu nuly. Hlava robota Namaste se střídá od středu doprava, doleva a poté zpět do středu kvůli otáčení servomotoru 1 z 0 ° - 180 °. Pohyb hlavy robota určuje, že robot Namaste hledá překážku. Když čidlo ping detekuje jakoukoli překážku, poloha hlavy robota se vrátí do středu a Servo motor1 se relikvie v úhlu 90 ° vypne. Aktivuje se ve stavu LOW.
Když se servomotor 1 vypne, zbývající motory jako servo4 a servo5 se zapnou. Signální linka je spuštěna pro pravé a levé rameno robota Namaste. Nyní mohou ruce robota pohybovat nahoru. Ramenní servomotory jsou propojeny s digitálními vstupními a výstupními piny desky Arduino. Ale signální vedení nebo tyto piny budou vysoké a poloha serva se změní na 90 °. Nyní se servo4 a servo 5 vypnou.
Nakonec můžeme dojít k závěru, že hlavním cílem tohoto hlasového ovládání službu má poskytovat robot zdvořilého přivítání lidí detekcí lidí, kteří jdou před ním. Může být použit na různých veřejných místech, jako jsou parky, nákupní střediska, večírky atd. Doufáme, že jste tomuto konceptu lépe porozuměli. Dále jakékoli dotazy týkající se tohoto konceptu nebo založeného na arduinu robotické projekty , uveďte své cenné návrhy komentářem v sekci komentářů níže.
Fotografické kredity:
- Deska Arduino nyacknewsandviews
- Senzor Ping paralaxa
- Hlasové přehrávání IC kealab
- Relé awdirect
- Namaste Robot canstockphoto







{kind=link}
{kind=link}
{kind=link}
{kind=link}