
Roboti jsou automatická elektromechanická zařízení podobná lidem nebo zvířatům, která jsou ovládána elektronickými obvody nebo počítačovým programem. Používají se různé typy robotů různé typy aplikací . Nedávné trendy v robotické technologii vyvíjejí pokročilé roboty, jako jsou chirurgické roboty, vzdálené manipulátory, které se používají při operacích (zejména při operacích klíčové dírky), chodící roboti, kteří jsou většinou vícenozí a jsou schopni se pohybovat chůzí, mikroboti a nanoboti jsou mikroskopičtí a tito nano roboty nebo nano zařízení, která se používají v lidském těle k léčbě nemocí, jsou rovery roboti s koly, kteří se používají k procházení jiných planet pro průzkum vesmíru. Typicky jsou roboty používané v kosmických aplikacích autonomní roboti , modulární rekonfigurovatelné roboty nebo samostatně konfigurovatelné modulární roboty atd.
Modulární rekonfigurovatelné roboty
Modulární rekonfigurovatelní roboti jsou obecně autonomní kinematická zařízení s nastavitelnou morfologií. U robotů s pevnou morfologií mohou provádět pouze běžné úkoly, jako je ovládání, snímání a ovládání. Samo-rekonfigurovatelní roboti nebo modulární rekonfigurovatelní roboti jsou však schopni změnit své vlastní tvary reorganizací konektivity svých dílů tak, aby se přizpůsobili novým okolnostem, prováděli nové úkoly a zotavili se z poškození.

Modulární rekonfigurovatelné roboty
Tyto samostatně konfigurovatelné roboty lze definovat jako roboty, kteří mohou měnit svůj tvar na základě cesty, kterou musí projít. Například pokud robot musí projít úzkou trubkou, pak se překonfiguruje ve tvaru červa a pokud musí projít nerovným terénem, překonfiguruje svůj tvar s pavoučími nohami. Pokud existuje rovný terén, překonfiguruje se jako struktura podobná kouli pro rychlý pohyb.
Tito rekonfigurovatelní roboti jsou opět klasifikováni do dvou typů na základě designu. Například homogenní modulární robotické systémy se skládají z několik modulů s podobným designem vytvořit strukturu tak, aby mohla provádět požadovaný úkol. Heterogenní modulární robotický systém se skládá z několika modulů s různým designem, z nichž každý plní specifické funkce a ty se používají k vytvoření struktury, která plní požadovaný úkol.
Překonfigurovatelné roboty ve vesmírných aplikacích
V rámci výzkumu na jiných planetách mnoho zemí často vypouští několik satelitů nebo vesmírných misí za účelem studia podmínek a charakteristik planet. Za účelem získávání dlouhodobých dat se tedy spouští dlouhodobé vesmírné mise a tyto dlouhodobé vesmírné mise jsou obvykle samy rekonfigurovatelné systémy.
Tito samočinně konfigurovatelní roboti jsou schopni zvládnout nepředvídané situace a samočinnou opravu v případě poškození. Víme, že vesmírné mise jsou obrovské a masově omezené, takže je výhodné, když použijeme konfigurovatelné roboty, které mohou provádět více úkolů místo více robotů že každý vykonává pouze jeden konkrétní úkol.

Roboti používané v kosmických aplikacích
Až do dnešního dne lidé vstoupili na jinou cestu, než je planeta Země je jen měsíc. Zatímco modulární roboti používané v kosmických aplikacích jsou spouštěni na mnoha jiných planetách. Série přistávacích strojů, manipulátorů, orbiterů a vozítek vyslaných na Mars jsou slavnými roboty používanými ve vesmírných aplikacích.
Robotické manipulátory a vozítka
Klouboví roboti ve vesmíru vykonávají různé typy úkolů. Proces údržby přístroje nebo zařízení ve vesmíru se nazývá manipulace s prostorem, která se provádí kloubovými roboty. Polybot se dobře hodí pro údržbu a kontrolu vesmírných stanic nebo satelitů. Robotické manipulátory jsou projektovány pro umístění v prostoru nebo na jiných planetách pro emulaci lidských manipulačních schopností. Obecně jsou umístěny na volně létajících kosmických lodích nebo na ladění oběžné dráhy jiných kosmických lodí, v kosmických vozidlech, planetárních přistávacích plošinách a roverech pro získávání vzorků.

Robotický manipulátor
Robotické rovery jsou promítány pro umístění na planetách pro emulaci pohybových schopností člověka. Často jsou umístěny na povrchu pozemských planet, malé solární systémy , aeroboti (planetární atmosféry), cydroboti (ledové vrstvy) a hydroboti (tekuté vrstvy).
Automatizovaný design a optimalizace
Modulární rekonfigurovatelné roboty nebo modulární robotický systém jsou kombinovány se softwarovými nástroji, které pomáhají vybrat a navrhnout tu nejlepší morfologii a řídicí strukturu pro provádění jednotlivých úkolů. Ačkoli mnoho rysů tohoto designu bude nevyhnutelně záviset na lidské inteligenci pro předvídatelnou budoucnost, jiné vlastnosti souhlasí s automatizovaným designem a optimalizací. Všechny rekonfigurovatelné roboty používané v kosmických aplikacích musí být navrženy tak, aby byly schopné přežít s odpalovacími napětími, zářením v prostoru, vakuem, planetární distribucí a prostředím planety (planeta, na které se rekonfigurovatelní roboti používají nebo na cílových planetách).
Existují dva typy návrhů rekonfigurovatelných robotů a jsou to: příhradové designy a řetězové designy.

Mřížkové návrhy mužského rekonfigurovatelného robota
V konstrukcích založených na mřížkách je rekonfigurace snadná, ale je obtížné generovat pohyb a tento design vyžaduje větší počet konektorů a akčních členů.

Řetězcové návrhy rekonfigurovatelného robota
V konstrukcích založených na řetězu je rekonfigurace tvrdá a má nedostatečnou tuhost, ale je snadné generovat pohyb.
Modulární rekonfigurovatelná simulace robota
Prostředí C ++ bylo vyvinuto softwarové simulační prostředí založené na fyzice, které uživatelům usnadňuje konstrukci rekonfigurovatelných robotů využívajících různé typy modulů. Pro rozšíření simulace jsou přidány další typy modulů s kompatibilními konektory.
Praktický příklad modulárního robota, který lze znovu konfigurovat

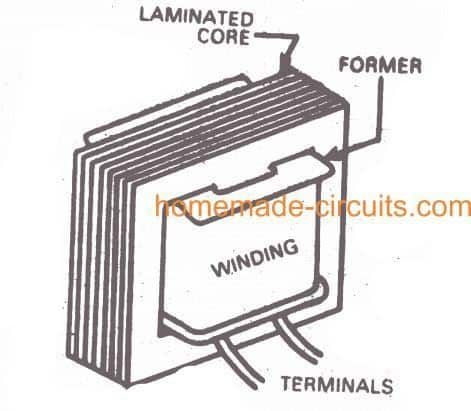
Modulární transformátorový modul
Modulární transformátor je jedním z často používaných rekonfigurovatelných robotů a tyto moduly M-TRAN se používají k vytvoření 3-D struktury (která může změnit svou vlastní konfiguraci a je také schopna generovat malé roboty), multi-DOF robota (který flexibilně lokomotuje), a proměňující robot. Tento modulární transformátor se skládá ze dvou akčních členů a baterie.

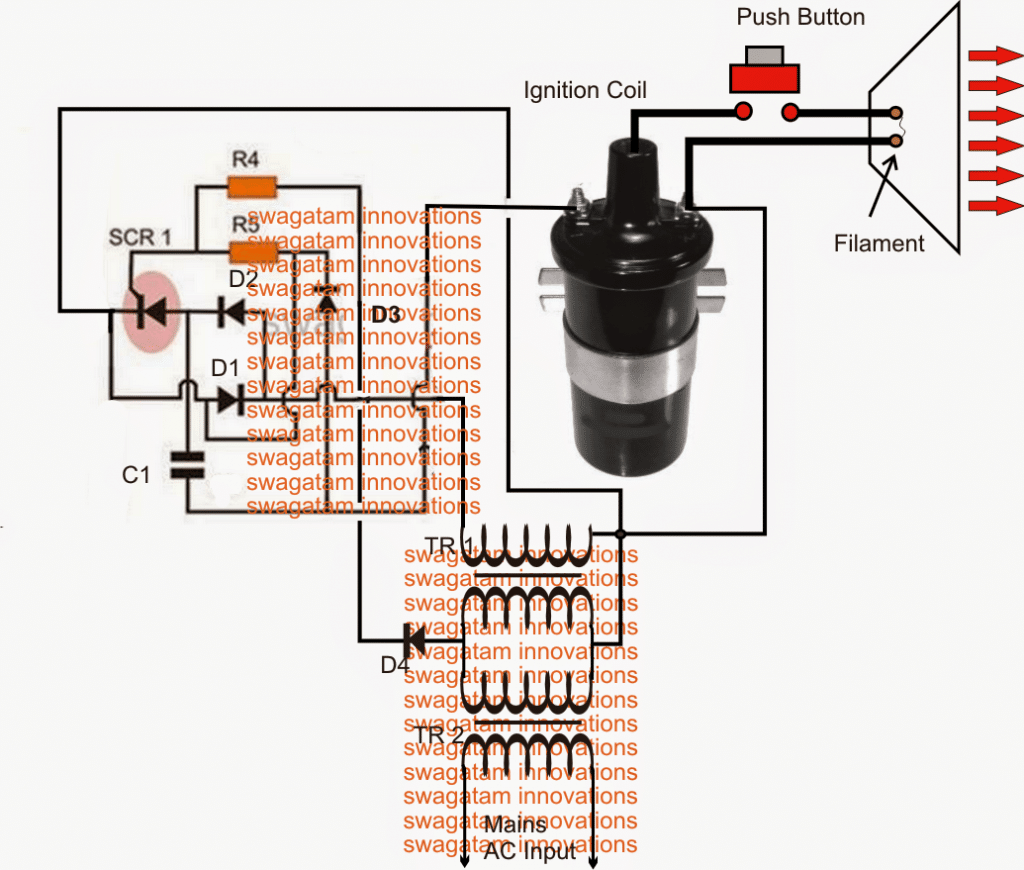
Interní schéma modulu M-TRAN
Interní blokové schéma modulu M-TRAN sestává z Li-ion baterie, nelineární pružiny, napájecího obvodu, hlavního CPU, snímače zrychlení, permanentního magnetu, SMA cívky, spojovací desky a PIC.
Tyto rekonfigurovatelné roboty se používají v kosmických aplikacích k dosažení konkrétních cílů, jako je poskytování telekomunikací, pozorování Země pro návrat dat, vojenská proveditelnost a navigační účely .
Existuje mnoho dalších robotických projektů a aplikací:
- Ultrazvukové Robotické vozidlo snímané z překážek
- Robotický pohyb vozidla mobilním telefonem
- Robotické vozidlo ovládané dálkovým ovladačem TV
- Sledování pohybu robotického vozidla
- Hasičský robot
- Hlasově ovládané robotické vozidlo
- Vyberte si N Place Robot Ovládá se bezdrátově Androidem
- Robotické vozidlo s detektorem kovů
- Auto Metro Train to Shuttle between Stations
- RF řízené robotické vozidlo
- Dálkově ovládané robotické vozidlo založené na dotykové obrazovce
Doufám, že tento článek poskytne stručné informace o modulárních rekonfigurovatelných robotech používaných v kosmických aplikacích. Další informace o robotické projekty elektroniky můžete nás kontaktovat zveřejněním vašich dotazů v sekci komentáře níže.
Fotografické kredity
- Modulární rekonfigurovatelné roboty od asmedigitalcollection
- Roboti používané v kosmických aplikacích robotnor
- Robot Manipulator od mikrobotika
- Mřížkové návrhy mužského rekonfigurovatelného robota od csail.mit
- Řetězové návrhy rekonfigurovatelného robota od wikimedia
- Modulární transformátorový modul od jednotka
- Interní schéma modulu M-TRAN od slidesharecdn










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}