Globální poziční systém neboli GPS je síť obíhajících satelitů, která slouží k lokalizaci pozic kdekoli ve vesmíru zpět na Zemi. Tento druh technologie lze použít v různých oblastech, jako je komerční využití, vojenské a civilní služby po celém světě. GPS lze použít pro tyto účely: dokonalé načasování, trilaterace, umístění satelitů a chybné připojení. Tento systém lze univerzálně použít po dobu 24 hodin. Než budeme diskutovat o cestovním asistentovi pro nevidomé založeném na GPS, dejte nám vědět o konceptu Technologie GPS .

Globální Polohovací Systém
Úvod do globálního pozičního systému (GPS)
The Globální Polohovací Systém se skládá ze tří segmentů: segmentu prostoru (SS), segmentu řízení (CS) a segmentu uživatele (US). Řídicí a vesmírné segmenty jsou vyvíjeny, provozovány a udržovány vzdušnými silami USA. Uživatelský segment zahrnuje civilní i vojenské uživatele a jejich GPS zařízení.

Systém GPS
Vesmírný segment
Tento segment se skládá z 24 satelitů, z nichž 21 jsou navigační kosmická vozidla a 3 jsou aktivní náhradní díly obíhající v nadmořské výšce 11000 námořních mil. Tyto satelity jsou předvídatelné a stabilní díky své vysoké nadmořské výšce. Tento systém se skládá ze šesti orbitálních rovin, které jsou nakloněné pod úhlem 55 stupňů a rovnoměrně umístěné pod úhlem přibližně 60 stupňů v rovníkové rovině.
Kontrolní segment
Obsahuje hlavní řídicí stanici, alternativní motorovou řídicí stanici, šest monitorovacích stanic a čtyři pozemní antény. Tyto monitorovací stanice jsou rozmístěny po celém světě a slouží k měření signálu z kosmických vozidel, která jsou začleněna do orbitálního modelu každého satelitu. K vysílání signálů na satelity se používají vyhrazené pozemní antény.
Segment uživatele
Tento systém se skládá z přijímačů, které lze ručně nebo instalovat do letadel, lodí, ponorek, automobilů a nákladních vozidel. Přijímače GPS mohou dekódovat, detekovat a zpracovat signály na satelity. Tyto signály lze změnit na polohu, čas a rychlost. Tento segment lze použít v různých aplikacích, jako je satelitní určování polohy, přeprava, armáda, průzkum a sledování.
Jedná se o technologii GPS a jako aplikaci tohoto GPS zde dáváme projekt, který má vést nevidomé jako hlasový navigační systém.
Systém hlasové navigace pro nevidomé založený na GPS (Global Positioning System)
Termín slepota se týká lidí, kteří nemají vůbec žádnou vizi, nebo lidí, kteří mají méně vidění. Většina nevidomých má při chůzi podporu od vodicích psů. Vysvětlujeme informace o systému GPS a hlasové navigace pro nevidomé. V této slepé lidé vydávají příkazy a poté přijímají odpověď pomocí zvukových signálů. Přijímač GPS se používá k nepřetržitému přijímání hodnot zeměpisné šířky a délky. S pokrokem v technologii je použití rozpoznávání hlasu snazší odesílat příkazy týkající se pokynů nevidomým. Jako aplikace této technologie GPS jsou zde v následujících odstavcích vysvětleny systémy hlasového varování pro nevidomé založené na GPS.

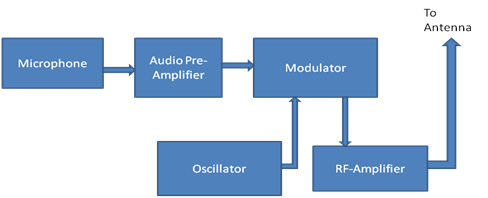
Blokové schéma systému hlasové navigace pro nevidomé
Použité hardwarové a softwarové komponenty
Tento slepý navigační systém je sestaven z hlavních komponent, jako je mikrokontrolér, přijímač GPS, modul rozpoznávání hlasu, jednotka přehrávání hlasu, reproduktor, ultrazvukový senzor a napájecí jednotka . Podívejme se podrobně na všechny tyto komponenty.
Mikrokontrolér
Tento ovladač je z Procesor ARM LPC2148, který kombinuje mikrokontrolér s vysokorychlostní flash pamětí v rozsahu od 32 do 512 kB. Má flash programovou paměť na čipu a statickou RAM na čipu. Má 10 bitů Převaděče A na D. a podporuje přenos USB 2.0 plnou rychlostí. Díky nízké ceně, nízké spotřebě energie a snadné manipulaci je tento mikrokontrolér pro tento projekt spolehlivý.
GPS přijímač
Globálním pozičním systémem nebo přijímačem GPS použitým v tomto projektu je GR87, který využívá vysílané signály pocházející ze satelitů GPS. Poskytuje trojrozměrné umístění, jako jsou hodnoty zeměpisné délky, šířky a nadmořské výšky, z každé polohy na tomto světě za všech povětrnostních podmínek. Hlavními vlastnostmi tohoto přijímače jsou nízká spotřeba energie, 1MB SRAM na čipu, doba opětovného získání 0,1 sekundy a hardware pro zmírnění více cest.
Modul rozpoznávání hlasu
Tento modul detekuje mluvené slovo uživatele pomocí mikrofonu. Po přijetí vstupního zvukového signálu bude tato jednotka provádět analýzu řeči. Tento systém se skládá ze dvou fází jako fáze výcviku a druhá je fáze rozpoznávání. Během tréninkové fáze musí reproduktor dávat řečové signály k procvičování systému a v jiné fázi musí reproduktor dávat řečové příkazy, které jsou dále spojeny s uloženými signály, zatímco jsou uloženy během tréninkové fáze. Tento projekt používá IC HM2007 jako modul rozpoznávání.
Jednotka hlasového přehrávání
Jedná se o vysoce výkonný integrovaný obvod AP89085 vyrobený s procesorem CMOS s integrovanou 2 MB EPROM. Jedná se o zvukový záznam a odpovídá na IC, který může uložit zprávu až do 85 s. Tento zaznamenaný zvuk je zachován i po odpojení zdroje napájení a tento přehrávaný zvuk je vysoce kvalitní s minimální úrovní šumu.
Ultrazvukový senzor
Tento senzor se používá pro detekci překážek na cestě nevidomých v tomto projektu. Tento senzor vysílá ultrazvukový záblesk a odpovídajícím způsobem dává výstupní impuls na základě času potřebného pro návrat ozvěny záblesku do ultrazvukový senzor . Tímto způsobem závisí na šířce impulzu ozvěny, lze snadno detekovat a měřit vzdálenostový cíl.
Jednotka reproduktoru
Reproduktor se používá k navádění osob se zrakovým postižením k jejich navigaci na základě signálů nebo zaznamenaného zvuku jednotky pro přehrávání hlasu.
MAX 232
K zajištění komunikace mezi přijímačem GPS a mikrokontrolérem se používá MAX 232. Toto je standardní sériová binární datová propojovací jednotka mezi datovým terminálem a datovou komunikační jednotkou. Signály úrovně RS232 z přijímače GPS jsou touto jednotkou převedeny na signály úrovně TTL mikrokontroléru.
Softwarové komponenty
Softwarové nástroje jako Vestavěné C, Keil IDE V tomto projektu se pro programování mikrokontroléru používají Uc-Flash.
Práce hlasového navigačního systému
Celý obvod je napájen regulovaným stejnosměrným napájením, jak je znázorněno v blokovém schématu. Přijímač GPS použitý v tomto projektu je schopen přijímat signály ze 65 satelitů GPS (Global Positioning System). Tyto přijaté signály jsou přenášeny do přesné polohy a časovacích informací, které lze číst z portu RS232 tohoto přijímače. Tato zeměpisná délka, zeměpisná šířka, nadmořská výška a načasování se odesílají do jednotky mikrokontroléru MAX232 IC . Tyto hodnoty jsou průběžně zpracovávány v mikrokontroléru.

Práce hlasového navigačního systému
Modul rozpoznávání hlasu rozpoznává mluvená slova uživatele a odpovídajícím způsobem odesílá tyto signály do mikrokontroléru. Mikrokontrolér porovnává hodnoty mluveného místa (zeměpisná délka, zeměpisná šířka a nadmořská výška) se signály z přijímače GPS. Na základě tohoto srovnání řídí mikrokontrolér jednotku pro přehrávání hlasu pro poskytování hlasové navigace uživateli. Předdefinované hlasy jsou v tomto modulu uloženy jako navigační příkazy pro nevidomé. Můžeme ukládat cílové hodnoty pro každý hlas mluveného příkazu do mikrokontroléru pro rozpoznávání cílů. Ultrazvukový senzor detekuje překážku na cestě k cíli, takže ji dostane mikrokontrolér a upozorní zrakově postižené osoby.
Jedná se o globální poziční systém nebo hlasový navigační systém založený na GPS pro nevidomé. Doufám, že s touto praktickou aplikací lépe porozumíte GPS. Dále jakákoli pomoc s realizací tohoto nebo jakéhokoli jiného projektu projekty elektroniky , zejména pro připojení přijímače GPS a jeho proces konfigurace můžete zanechat své komentáře níže.