V tomto příspěvku se učíme obvod časovače zpětného chodu pro provozování mechanismu inkubátoru s preferovanou sadou pohybů. Nápad požadoval pan Anwar
Technické specifikace
Jsem z Indonésie ..... Potřebuji schémata pro inkubátor s časovačem s motorem s vysokým točivým momentem (jednosměrné motorové okno v autě). Snažím se, aby stejnosměrný motor běžel ve dvou směrech, dokud nedosáhne koncové polohy, pak se zastaví a přepne polaritu, aby při opětovném připojení napájení běžel opačným směrem. Pak udělejte totéž na druhém konci.
1. časovač zapne napájení na 1 minutu. (7:00 - 7:00)
2. motor běží jedním směrem, dokud nenarazí do polohy zastavení, řekněme 30 sekund.
3. napájení motoru se vypne, když dosáhne polohy zastavení a zpoždění o 1 minutu. časovač pro ukončení / vypnutí hlavního napájení. také obrací polaritu tak, že.
4. příště, když hlavní časovač přijde (10: 00-10: 01), dávkuje to samé v opačném směru a neustále se opakuje
5. Zpětný motor 12 VDC (jen dva kabely od motoru + a -)
6. Potřebujete LED indikátor pro motor Rev / Fwd
Můžete mi pomoci, pane?
Za každou pomoc předem děkuji.
Jedná se o důležitý domácí projekt, který musí být stoprocentně spolehlivý.
Design

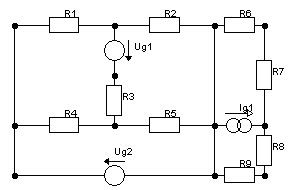
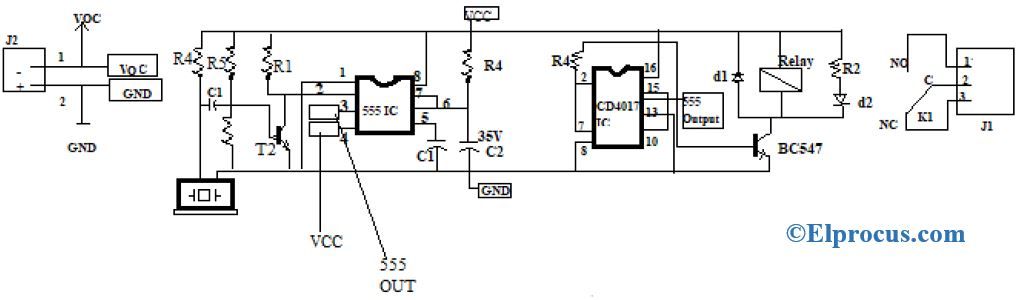
Na výše uvedeném obrázku můžeme vizualizovat design pro implementaci navrhovaného zpětného chodu inkubačního motoru po předem stanovené sadě časových intervalů.
V okamžiku zapnutí napájení máme následující scénář:
Lze předpokládat, že magnetický spínač pro „nastavení“ je v deaktivovaném stavu nebo stlačený, když je motor nebo navržený inkubační mechanismus v nulové počáteční poloze.
Pamatujte, že přednostně by spínače „set“ / „reset“ měly být implementovány pomocí magnetických jazýčkových spínačů.
Když je napájení zapnuto, IC 4060 se resetuje pomocí C2, aby zahájil proces počítání od nuly, a pin3 je vykreslen jako nulová logika.
Tato počáteční nulová logika je vedena přes C3 do základny T1, která okamžitě vede k aktivaci T3 a přidruženého relé. R7 v procesu zajišťuje, že se v tomto režimu zablokují T1 / T3.
Relé DPDT v tomto bodě pracuje na svých spínacích kontaktech, které inicializují motor a mechanismus směrem k předpokládanému „dopřednému“ pohybu.
Jakmile se motor začne pohybovat, uvolní se tlačítko „set“, takže T4 a horní SPDT dostanou příležitost k aktivaci, přičemž relé SPDT dosáhne přepnutí polohy N / O, čímž se kontakty N / C DPDT přepnou do pohotovostního režimu zásobování..
Motor a / nebo mechanismus se stále pohybují, dokud nedosáhne polohy „reset“, což způsobí, že se T2 aktivuje a rozbije západku T1 / T4.
Při vypnutém T4 změní relé DPDT svou polohu z N / O na N / C a poskytuje opačný (zpětný) pohyb vůči mechanismu motoru.
Mechanismus motoru inkubátoru nyní převrátí svůj směr a zahájí zpětný pohyb, dokud nedosáhne nastaveného bodu, který rychle vypne základní pohon T4, SPDT vypne řeznou sílu DPDT a celý mechanismus se zastaví .
Mezitím IC 4060 pokračuje v počítání, dokud znovu neprodukuje nulovou logiku poté, co prošel vysokou logikou na svém pin3 (vybitím C3).
Cyklus se znovu zahájí a opakuje postup, jak je vysvětleno výše.
Předchozí: Blikání LED pomocí Arduina - kompletní návod Další: Byl prozkoumán vysoce výkonný průmyslový tlumič přepětí