
Téměř každý mechanický vývoj, který kolem sebe vidíme, je realizován elektromotorem. Elektrické stroje jsou metodou přeměny energie. Motory odebírají elektrickou energii a vyrábějí mechanickou energii. Elektrické motory se používají k napájení stovek zařízení, která používáme v každodenním životě. Elektromotory jsou obecně rozděleny do dvou různých kategorií: stejnosměrný (DC) motor a střídavý (AC) motor. V tomto článku se budeme zabývat stejnosměrným motorem a jeho fungováním. A také to, jak fungují stejnosměrné motory s převodovkou.
Co je stejnosměrný motor?
NA Stejnosměrný motor je elektrický motor který běží na stejnosměrný proud. U elektromotoru je provoz závislý na jednoduchém elektromagnetismu. Vodič nesoucí proud generuje magnetické pole, když je toto umístěno do vnějšího magnetického pole, narazí na sílu úměrnou proudu ve vodiči a síle vnějšího magnetického pole. Jedná se o zařízení, které převádí elektrickou energii na energii mechanickou. Funguje to na tom, že vodič procházející proudem umístěný v magnetickém poli zažívá sílu, která způsobí, že se bude otáčet vzhledem k jeho původní poloze. Praktický stejnosměrný motor se skládá z vinutí pole, které zajišťují magnetický tok a kotvu, která působí jako vodič.

Střídavý stejnosměrný motor
Vstup z střídavý stejnosměrný motor je proud / napětí a jeho výstupem je točivý moment. Porozumění fungování stejnosměrného motoru je velmi jednoduché, základní schéma je uvedeno níže. Stejnosměrný motor se v zásadě skládá ze dvou hlavních částí. Rotující část se nazývá rotor a stacionární část se také nazývá stator. Rotor se otáčí vzhledem ke statoru.
Rotor se skládá z vinutí, přičemž vinutí jsou elektricky spojena s komutátorem. Geometrie kartáčů, kontaktů komutátoru a vinutí rotoru jsou takové, že při napájení je polarita napájeného vinutí a magnety statoru nesprávně vyrovnána a rotor se bude otáčet, dokud nebude téměř vyrovnán pomocí magnetů pole statoru.
Jakmile rotor dosáhne vyrovnání, kartáče se přesunou k dalším kontaktům komutátoru a napájí další vinutí. Rotace obrací směr proudu skrz vinutí rotoru, což vyvolává převrácení magnetického pole rotoru a udržuje jej v rotaci.
Konstrukce stejnosměrného motoru
Konstrukce stejnosměrného motoru je uvedena níže. Je velmi důležité znát jeho design, než se dozvíte, že funguje. Mezi základní součásti tohoto motoru patří kotva i stator.

DC MOTOR
Cívka kotvy je rotující část, zatímco stacionární část je stator. V tomto případě je cívka kotvy připojena k stejnosměrnému napájení, které zahrnuje kartáče i komutátory. Hlavní funkcí komutátoru je převod AC na DC, který je indukován v armatuře. Tok proudu lze dodávat pomocí kartáče z rotační části motoru směrem k neaktivní vnější zátěži. Uspořádání kotvy může být provedeno mezi dvěma póly elektromagnetu nebo trvalé.
Díly stejnosměrného motoru
U stejnosměrných motorů existují různé populární konstrukce motorů, které jsou k dispozici jako bezkartáčový permanentní magnet, série, kombinovaná rána, zkrat, jinak stabilizovaný zkrat. Obecně platí, že části stejnosměrného motoru jsou v těchto populárních provedeních stejné, ale celá jeho činnost je stejná. Mezi hlavní části stejnosměrného motoru patří následující.
Stator
Stacionární část jako stator je jednou z částí součástí stejnosměrného motoru, která zahrnuje polní vinutí. Hlavní funkcí tohoto je získat zásobu.
Rotor
Rotor je dynamická část motoru, která se používá k vytvoření mechanických otáček jednotky.
Kartáče
Kartáče využívající komutátor fungují hlavně jako můstek k upevnění stacionárního elektrického obvodu směrem k rotoru.
Komutátor
Jedná se o dělený prsten, který je navržen s měděnými segmenty. Je to také jedna z nejdůležitějších částí stejnosměrného motoru.
Polní vinutí
Tato vinutí jsou vyrobena s polními cívkami, které jsou známé jako měděné dráty. Tato vinutí zaoblují přibližně štěrbiny nesené pólovými botami.
Vinutí armatury
Konstrukce těchto vinutí ve stejnosměrném motoru je dvou typů, jako je Lap & Wave.
Jho
Magnetický rám jako třmen je někdy navržen s litinou nebo ocelí. Funguje to jako stráž.
Poláci
Póly v motoru zahrnují dvě hlavní části, jako je jádro pólu, a pólové nástavce. Tyto základní části jsou vzájemně spojeny pomocí hydraulické síly a jsou spojeny s třmenem.
Zuby / drážka
Nevodivé vložky štěrbin jsou často zaseknuty mezi stěnami štěrbin, stejně jako cívky pro bezpečnost od nuly, mechanickou podporu a další elektrickou izolaci. Magnetický materiál mezi štěrbinami se nazývá zuby.
Pouzdro motoru
Skříň motoru poskytuje podporu kartáčům, ložiskům a železnému jádru.
Pracovní princip
Elektrický stroj, který se používá k přeměně energie z elektrické na mechanickou, se nazývá stejnosměrný motor. The Princip fungování stejnosměrného motoru je to, že když je vodič procházející proudem umístěn v magnetickém poli, pak zažívá mechanickou sílu. O tomto směru síly lze rozhodnout pomocí Flemmingova pravidla levé ruky i jeho velikosti.
Pokud je první prst natažený, bude druhý prst, stejně jako palec levé ruky, navzájem svisle a primární prst značí směr magnetického pole, další prst značí aktuální směr a třetí prst připomíná prst směr síly, který prochází vodičem.
F = BIL newtonů
Kde,
„B“ je hustota magnetického toku,
„Já“ je aktuální
„L“ je délka vodiče v magnetickém poli.
Kdykoli je vinutí kotvy přivedeno ke stejnosměrnému napájení, pak se ve vinutí nastaví tok proudu. Vinutí pole nebo permanentní magnety zajistí magnetické pole. Takže vodiče kotvy zažijí sílu kvůli magnetickému poli založenému na výše uvedeném principu.
Komutátor je navržen jako úseky k dosažení jednosměrného krouticího momentu, jinak by se dráha síly pokaždé převrátila, jakmile se způsob pohybu vodiče v magnetickém poli převrátí. Toto je pracovní princip stejnosměrného motoru.
Typy stejnosměrných motorů
Níže jsou popsány různé typy stejnosměrných motorů.
Převodové stejnosměrné motory
Převodové motory mají tendenci snižovat otáčky motoru, ale s odpovídajícím zvýšením točivého momentu. Tato vlastnost se hodí, protože stejnosměrné motory se mohou otáčet příliš rychle, než aby je mohlo elektronické zařízení využívat. Převodové motory se obvykle skládají z stejnosměrného kartáčového motoru a převodovky připojené k hřídeli. Motory se vyznačují převodovkou dvěma připojenými jednotkami. Má mnoho aplikací díky nákladům na návrh, snižuje složitost a konstrukci aplikací, jako jsou průmyslová zařízení, akční členy, lékařské nástroje a robotika.
- Žádného dobrého robota nelze nikdy postavit bez rychlostních stupňů. Po zvážení všech věcí je velmi důležité dobré pochopení toho, jak ozubená kola ovlivňují parametry, jako je točivý moment a rychlost.
- Ozubená kola fungují na principu mechanické výhody. To znamená, že použitím výrazných průměrů převodů můžeme vyměňovat mezi rychlostí otáčení a točivým momentem. Roboti nemají požadovaný poměr rychlosti k točivému momentu.
- V robotice je točivý moment lepší než rychlost. U převodů je možné vyměnit vysokou rychlost za lepší točivý moment. Zvýšení točivého momentu je nepřímo úměrné snížení rychlosti.

Převodové stejnosměrné motory
Snížení rychlosti stejnosměrného motoru s převodovkou
Snížení rychlosti v převodových stupních zahrnuje malý převodový stupeň pohánějící větší převodový stupeň. V redukční převodovce může být několik sad těchto redukčních soukolí.

Snížení rychlosti u stejnosměrného motoru s převodovkou
Někdy je cílem použití převodového motoru snížit rychlost otáčení hřídele motoru v poháněném zařízení, například v malých elektrických hodinách, kde se malý synchronní motor může otáčet rychlostí 1 200 ot./min, avšak při řízení se sníží na jednu ot./min z druhé ruky a dále se zmenšil v hodinovém mechanismu, aby poháněl minutovou a hodinovou ručičku. Zde je množství hnací síly irelevantní, pokud je dostatečné k překonání třecích nárazů hodinového mechanismu.
Sériový stejnosměrný motor
Sériový motor je stejnosměrný motor, kde je vnitřní vinutí sériově připojeno k vinutí kotvy. Sériový motor poskytuje vysoký rozběhový točivý moment, ale nikdy nesmí běžet bez zátěže a při prvním zapnutí je schopen přenášet velmi velká zatížení hřídele. Sériové motory jsou také známé jako sériově vinuté motory.
U sériových motorů jsou polní vinutí spojena v sérii s kotvou. Síla pole se mění s vývojem proudu kotvy. V době, kdy jsou jeho otáčky sníženy zátěží, dosahuje sériový motor vynikajícího točivého momentu. Jeho počáteční točivý moment je více než různé druhy stejnosměrného motoru.
Může také snadněji vyzařovat teplo, které se nahromadilo ve vinutí v důsledku velkého množství přenášeného proudu. Jeho rychlost se podstatně posouvá mezi plným a prázdným zatížením. Po odstranění zátěže se zvýší rychlost motoru a sníží se proud skrz kotvu a cívky pole. Nezatížený provoz velkých strojů je nebezpečný.

Řada motorů
Proud skrz kotvu a cívky pole klesá, síla čar toku kolem nich oslabuje. Pokud by se síla čar toku kolem cívek snížila stejnou rychlostí jako proud protékající nimi, obě by se snižovaly stejnou rychlostí při
což zvyšuje rychlost motoru.
Výhody
Mezi výhody sériového motoru patří následující.
- Obrovský rozběhový moment
- Jednoduchá konstrukce
- Navrhování je snadné
- Údržba je snadná
- Nákladově efektivní
Aplikace
Sériové motory mohou produkovat enormní točivý výkon, točivý moment ze svého klidového stavu. Díky této vlastnosti jsou sériové motory vhodné pro malá elektrická zařízení, univerzální elektrická zařízení atd. Sériové motory nejsou vhodné, pokud jsou zapotřebí konstantní otáčky. Důvodem je to, že rychlost sériových motorů se velmi mění s různým zatížením.
Derivační motor
Bočníkové motory jsou bočníkové stejnosměrné motory, kde jsou vinutí pole posunuta k vinutí kotvy motoru nebo jsou k němu připojena paralelně. Bočníkový stejnosměrný motor se běžně používá kvůli své nejlepší regulaci rychlosti. Proto jsou jak vinutí kotvy, tak vinutí pole uváděny na stejné napájecí napětí, existují však diskrétní větve pro proud proudu kotvy a proud pole.
Vypínací motor má poněkud výrazné pracovní vlastnosti než sériový motor. Vzhledem k tomu, že cívka bočníku je vyrobena z jemného drátu, nemůže produkovat velký proud pro spouštění jako sériové pole. To znamená, že motor bočníku má extrémně nízký rozběhový moment, což vyžaduje, aby zatížení hřídele bylo poměrně malé.

Derivační motor
Když je na směšovač přiváděno napětí, protéká cívkou směšovače velmi malé množství proudu. Kotva pro směšovač je podobná sériovému motoru a bude odebírat proud, aby vytvořila silné magnetické pole. V důsledku interakce magnetického pole kolem kotvy a pole vytvářeného kolem bočníku se motor začne otáčet.
Stejně jako sériový motor, když se kotva začne otáčet, bude produkovat zpět EMF. Zadní EMF způsobí, že se proud v armatuře začne snižovat na velmi malou úroveň. Množství proudu, které bude kotva odebírat, přímo souvisí s velikostí zátěže, když motor dosáhne plné rychlosti. Protože zátěž je obecně malá, bude proud kotvy malý.
Výhody
Mezi výhody bočníku patří následující.
- Jednoduchý výkon ovládání, jehož výsledkem je vysoká úroveň flexibility při řešení složitých problémů s měničem
- Vysoká dostupnost, proto je nutné minimální úsilí
- Vysoká úroveň elektromagnetické kompatibility
- Velmi hladký chod, proto nízké mechanické namáhání celého systému a vysoké dynamické řídicí procesy
- Široký rozsah ovládání a nízké rychlosti, proto univerzálně použitelné
Aplikace
Napěťové stejnosměrné motory jsou velmi vhodné pro aplikace poháněné řemenem. Tento motor s konstantní rychlostí se používá v průmyslových a automobilových aplikacích, jako jsou obráběcí stroje a navíjecí / odvíjecí stroje, kde je vyžadována velká přesnost točivého momentu.
Složené motory DC
Stejnosměrné sdružené motory obsahují samostatně buzené bočníkové pole, které má vynikající počáteční točivý moment, avšak v aplikacích s proměnnými otáčkami čelí problémům. Pole v těchto motorech může být zapojeno do série prostřednictvím kotvy a také bočního pole, které je samostatně buzeno. Sériové pole poskytuje vynikající počáteční točivý moment, zatímco bočníkové pole poskytuje lepší regulaci rychlosti. Sériové pole ale způsobuje problémy s řízením v aplikacích frekvenčních měničů a ve 4kvadrantových měničích se obvykle nepoužívá.
Samostatně nadšený
Jak název napovídá, vinutí pole jsou jinak napájena cívkami prostřednictvím samostatného stejnosměrného zdroje. Unikátní skutečnost těchto motorů spočívá v tom, že proud kotvy nedodává skrz polní vinutí, protože polní vinutí je zesíleno ze samostatného externího zdroje stejnosměrného proudu. Rovnice točivého momentu stejnosměrného motoru je Tg = Ka φ Ia, v tomto případě se točivý moment mění změnou toku toku „φ“ a nezávisle na proudu kotvy „Ia“.
Vzrušený
Jak název napovídá, u tohoto typu motoru může být proud ve vinutí dodáván samotným motorem, jinak strojem. Dále je tento motor rozdělen na sériově vinutý a zkratově vinutý motor.
Stejnosměrný motor s permanentním magnetem
Stejnosměrný motor PMDC nebo permanentní magnet obsahuje vinutí kotvy. Tyto motory jsou konstruovány s permanentními magnety umístěním na vnitřní okraj statorového jádra pro generování toku pole. Na druhé straně rotor obsahuje konvenční stejnosměrnou armaturu včetně kartáčů a segmentů komutátoru.
U stejnosměrného motoru s permanentním magnetem může být magnetické pole vytvářeno prostřednictvím permanentního magnetu. Vstupní proud se tedy nepoužívá k buzení, které se používá u klimatizačních zařízení, stěračů, startérů automobilů atd.
Připojení stejnosměrného motoru k mikrokontroléru
Mikrokontroléry nemohou řídit motory přímo. Takže potřebujeme nějaký ovladač, který bude řídit rychlost a směr motorů. Ovladače motoru budou fungovat jako propojovací zařízení mezi nimi mikrokontroléry a motory . Budiče motoru budou fungovat jako proudové zesilovače, protože přijímají řídicí signál malého proudu a poskytují signál vysokého proudu. Tento vysokonapěťový signál se používá k pohonu motorů. Použití čipu L293D je snadný způsob ovládání motoru pomocí mikrokontroléru. Obsahuje interně dva obvody ovladače H-můstku.
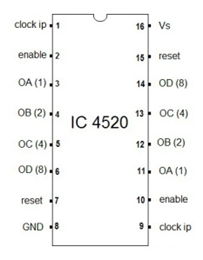
Tento čip je určen k ovládání dvou motorů. L293D má dvě sady uspořádání, kde 1 sada má vstup 1, vstup 2, výstup 1, výstup 2, s aktivačním kolíkem, zatímco jiná sada má vstup 3, vstup 4, výstup 3, výstup 4 s jiným aktivačním kolíkem. Zde je video související s L293D
Zde je příklad stejnosměrného motoru, který je propojen s mikrokontrolérem L293D.

Stejnosměrný motor propojen s mikrokontrolérem L293D
L293D má dvě sady uspořádání, kde jedna sada má vstup 1, vstup 2, výstup 1 a výstup 2 a další sada má vstup 3, vstup 4, výstup 3 a výstup 4, podle výše uvedeného schématu,
- Pokud jsou kolíky č. 2 a 7 vysoké, pak kolíky č. 3 a 6 jsou také vysoké. Pokud je uvolnění 1 a číslo kolíku 2 vysoké a kolík číslo 7 je nízký, motor se otáčí dopředu.
- Pokud je aktivace 1 a číslo kolíku 7 vysoké a kolík číslo 2 je nízký, motor se otáčí opačným směrem.
Dnes se stejnosměrné motory stále nacházejí v mnoha aplikacích, jako jsou hračky a diskové mechaniky, nebo ve velkých velikostech pro provoz ocelových válcoven a papírenských strojů.
Rovnice stejnosměrného motoru
Velikost zaznamenaného toku je
F = BlI
Kde, B- hustota toku v důsledku toku vytvářeného polními vinutími
l- Aktivní délka vodiče
I-proud procházející vodičem
Při otáčení vodiče je indukován EMF, který působí ve směru opačném k dodávanému napětí. Je uveden jako

Kde, Ø- Fluz kvůli polním vinutím
P- Počet pólů
A-A konstanta
N - Rychlost motoru
Z- Počet vodičů
Napájecí napětí, V = Eb+ JánaRna
Vyvinutý točivý moment je
 Točivý moment je tedy přímo úměrný proudu kotvy.
Točivý moment je tedy přímo úměrný proudu kotvy.
Rychlost se také mění s proudem kotvy, proto nepřímý točivý moment a rychlost motoru na sobě závisí.
U stejnosměrného bočního motoru zůstávají otáčky téměř konstantní, i když se točivý moment zvyšuje z nulového na plné
U stejnosměrného motoru se otáčky snižují s rostoucím točivým momentem od bez zátěže po plné zatížení.
Točivý moment lze tedy regulovat změnou rychlosti. Regulace rychlosti je dosažena buď
- Změna toku řízením proudu prostřednictvím vinutí pole - metoda řízení toku. Touto metodou se rychlost reguluje nad jmenovitou rychlost.
- Řízení napětí armatury - Poskytuje řízení rychlosti pod normální rychlostí.
- Řízení napájecího napětí - zajišťuje řízení rychlosti v obou směrech.
4 kvadrantový provoz
Obecně může motor pracovat ve 4 různých regionech. The čtyřkvadrantový provoz stejnosměrného motoru zahrnuje následující.
- Jako motor ve směru dopředu nebo ve směru hodinových ručiček.
- Jako generátor ve směru dopředu.
- Jako motor v opačném nebo proti směru hodinových ručiček.
- Jako generátor v opačném směru.

4 kvadrantový provoz stejnosměrného motoru
- V prvním kvadrantu motor pohání zátěž jak rychlostí, tak točivým momentem v pozitivním směru.
- Ve druhém kvadrantu se obrátí směr točivého momentu a motor funguje jako generátor
- Ve třetím kvadrantu motor pohání zátěž rychlostí a točivým momentem v záporném směru.
- Ve 4.thkvadrant, motor funguje jako generátor v reverzním režimu.
- V prvním a třetím kvadrantu působí motor vpřed i vzad. Například motory v jeřábech, aby zvedly břemeno a také jej položily.
Ve druhém a čtvrtém kvadrantu působí motor jako generátor v dopředném a zpětném směru a dodává energii zpět zdroji energie. Způsob, jak ovládat provoz motoru, aby fungoval v kterémkoli ze 4 kvadrantů, je řízení jeho rychlosti a směru otáčení.
Rychlost je řízena buď změnou napětí kotvy, nebo oslabením pole. Směr točivého momentu nebo směr otáčení je řízen změnou rozsahu, ve kterém je aplikované napětí větší nebo menší než zadní emf.
Běžné poruchy stejnosměrných motorů
Je důležité znát a rozumět poruchám a poruchám motoru a popsat nejvhodnější bezpečnostní zařízení pro každý případ. Existují tři typy poruch motoru, jako je mechanická, elektrická a mechanická, které přerůstají do elektrické. Mezi nejčastěji se vyskytující poruchy patří následující,
- Členění izolace
- Přehřátí
- Přetížení
- Selhání ložiska
- Vibrace
- Zablokovaný rotor
- Nesouosost hřídele
- Zpětný chod
- Nerovnováha fáze
Mezi nejčastější poruchy, které se vyskytují u střídavých motorů i stejnosměrných motorů, patří následující.
- Pokud není motor správně namontován
- Když je motor blokován nečistotami
- Když motor obsahuje vodu
- Když se motor přehřívá
12 V DC motor
12V stejnosměrný motor je levný, malý i výkonný, který se používá v několika aplikacích. Výběr vhodného stejnosměrného motoru pro konkrétní aplikaci je náročný úkol, takže je velmi důležité pracovat přesnou společností. Nejlepším příkladem těchto motorů je společnost METMotors, protože již 45 let vyrábějí vysoce kvalitní motory PMDC (permanentní magnet DC).
Jak vybrat správný motor?
Výběr 12V stejnosměrného motoru lze provést velmi snadno pomocí METmotors, protože odborníci této společnosti nejdříve prostudují vaši správnou aplikaci a poté zváží řadu charakteristik a specifikací, které vám zaručí, že budete mít na výběr z nejlepších možných produktů.
Provozní napětí je jednou z charakteristik tohoto motoru.
Jakmile je motor poháněn bateriemi, obvykle se volí nízké provozní napětí, protože k získání konkrétního napětí je zapotřebí méně článků. Ale při vysokém napětí je pohon stejnosměrného motoru obvykle účinnější. I když je jeho provoz dosažitelný s 1,5 volty, které jdou až do 100V. Nejčastěji používané motory jsou 6v, 12v a 24v. Další hlavní specifikace tohoto motoru jsou rychlost, provozní proud, výkon a točivý moment.
12V DC motory jsou ideální pro různé aplikace díky stejnosměrnému napájení vyžadujícímu točivý moment i vysoký rozběh. Tyto motory pracují při nižších rychlostech ve srovnání s jinými napětími motoru.
Vlastnosti tohoto motoru se liší hlavně v závislosti na výrobní společnosti a použití.
- Otáčky motoru jsou 350 ot / min až 5 000 ot / min
- Jmenovitý točivý moment tohoto motoru se pohybuje od 1,1 do 12,0 in-lbs
- Výstupní výkon tohoto motoru se pohybuje od 01 hp do 21 hp
- Velikost rámu je 60 mm, 80 mm, 108 mm
- Vyměnitelné kartáče
- Typická životnost štětce je 2000+ hodin
Zpět EMF ve stejnosměrném motoru
Jakmile je vodič procházející proudem uspořádán v magnetickém poli, pak bude kroutící moment indukovat přes vodič a točivý moment bude otáčet vodičem, který krájí tok magnetického pole. Na základě jevu elektromagnetické indukce, jakmile vodič rozřízne magnetické pole, a poté indukuje EMF uvnitř vodiče.
Směr indukovaného EMF lze určit pomocí Flemmingova pravého pravidla. Podle tohoto pravidla, pokud uchopíme náš miniaturní, indexový a středový prst pod úhlem 90 °, potom bude ukazováček znamenat cestu magnetického pole. Palcový prst zde představuje způsob pohybu vodiče a prostřední prst označuje indukovaný EMF nad vodičem.
Použitím Flemmingova pravého pravidla si můžeme všimnout, že směr indukovaného emf je opačný k použitému napětí. Emf se tedy nazývá back emf nebo counter emf. Vývoj zpětného emf může být proveden v sérii prostřednictvím aplikovaného napětí, avšak obráceně ve směru, to znamená, že zadní emf odolává toku proudu, který jej způsobuje.
Velikost zpětného emf může být dána podobným výrazem, jako je následující.
Eb = NP ϕZ / 60A
Kde
„Eb“ je motorem indukovaný EMF s názvem Zpětný EMF
„A“ je ne. rovnoběžných pruhů v celé kotvě mezi kartáči s obrácenou polaritou
„P“ je ne. pólů
„N“ je rychlost
„Z“ je celý počet vodičů v armatuře
„Φ“ je užitečný tok pro každý pól.
Ve výše uvedeném obvodu je velikost zpětného emf vždy nízká ve srovnání s aplikovaným napětím. Rozdíl mezi těmito dvěma je téměř ekvivalentní, jakmile stejnosměrný motor pracuje za obvyklých podmínek. Proud se indukuje na stejnosměrném motoru v důsledku hlavního napájení. Vztah mezi hlavním napájením, zpětným EMF a proudem kotvy lze vyjádřit jako Eb = V - IaRa.
Aplikace pro řízení provozu stejnosměrného motoru ve 4 kvadrantech
Řízení provozu stejnosměrného motoru ve 4 kvadrantech lze dosáhnout pomocí mikrokontroléru propojeného se 7 spínači.

4 kvadrantové ovládání
Případ 1: Když je stisknut spínač startu a ve směru hodinových ručiček, logika v mikrokontroléru poskytuje výstup logiky od minima po pin 7 a logiky od maxima po pin2, čímž se motor otáčí ve směru hodinových ručiček a pracuje v 1Svatýkvadrant. Rychlost motoru lze měnit stisknutím spínače PWM, což způsobí aplikaci pulzů s různou dobou trvání na aktivační kolík budicího IC, čímž se mění aplikované napětí.
Případ 2: Když je stisknuta brzda vpřed, logika mikrokontroléru aplikuje logiku nízko na pin7 a logiku vysoko na pin 2 a motor má tendenci pracovat v opačném směru, což okamžitě zastaví.
Podobným způsobem způsobí stisknutí spínače proti směru hodinových ručiček motor v opačném směru, tj. V poloze 3rdkvadrant a stisknutí spínače zpátečky způsobí okamžité zastavení motoru.
Správným programováním mikrokontroléru a spínači lze provoz motoru ovládat v každém směru.
Jedná se tedy o přehled stejnosměrného motoru. The výhody stejnosměrného motoru poskytují vynikající řízení rychlosti pro zrychlení a zpomalení, snadno srozumitelný design a jednoduchý a levný design pohonu. Zde je otázka, jaké jsou nevýhody stejnosměrného motoru?
Fotografické kredity:
- Střídavé stejnosměrné motory Pracujte news.softpedia
- 4 kvadrantový provoz stejnosměrného motoru do lh5.ggpht
- Převodový stejnosměrný motor od wikimedia
- Vypínací motor pásmo

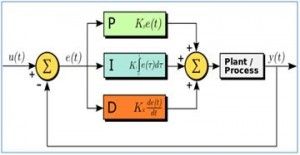
![Obvody nabíječky baterií 12V [využívající tranzistory LM317, LM338, L200]](https://electronics.jf-parede.pt/img/battery-chargers/11/12v-battery-charger-circuits-using-lm317.png)









{kind=link}
{kind=link}
{kind=link}
{kind=link}