
WSG-DSA je prst chapadla, který integruje hmatové snímání pro zpětnou vazbu profilu s vysokým rozlišením během uchopení. Pro účely snímání používá inteligentní dotykový snímač DSA9205i. Pasuje na horní část čelistí WSG a je přímo propojen s ovladačem chapadla prostřednictvím integrovaného portu senzoru v čelistech základny, takže nejsou nutné žádné externí komponenty a kabely, aby bylo možné zahrnout hmatové zařízení do vašich manipulačních aplikací. Tyto typy snímačů prstů detekovány automaticky a parametrizovány WSG. Tlakový profil lze použít z vnitřní strany ovladače chapadla pomocí výkonného skriptovacího rozhraní. Tento článek pojednává o typech hmatových senzory a jejich fungování .
Co je to hmatový senzor?
Hmatový senzor je zařízení. Měří přicházející informace v reakci na fyzickou interakci s prostředím. Pocit dotyku u lidí je obecně modelován, tj. Kožní smysl a kinestetický smysl. Kožní dotek má schopnost detekovat podněty vyplývající z mechanické stimulace, bolesti a teploty. Kinestetický dotek přijímá senzorové vstupy z receptorů přítomných uvnitř svalů, šlach a kloubů.

Hmatový senzor
Typy hmatových senzorů
Níže jsou uvedeny různé typy hmatových senzorů
- Senzor síly / momentu
- Dynamický senzor
- Tepelný senzor
Senzor síly / momentu
Senzory síly / točivého momentu se používají v kombinaci s hmatovým polem, aby poskytly informace pro řízení síly. Tyto typy senzorů může snímat zatížení kdekoli, jako je distální článek manipulátoru a v omezeních jako kožní senzor. Kožní senzor obecně poskytuje přesnější měření síly při vyšších šířkách pásma. Pokud je propojení manipulátoru definováno obecně a předpokládá se kontakt signálního bodu, pak snímač síly / momentu může poskytnout informace o kontaktním místě síly a momentů - nazývá se to vnitřní hmatové snímání. Obrázek snímače točivého momentu je uveden níže.

Senzor síly nebo točivého momentu
Dynamický senzor
Dynamické senzory jsou menší akcelerometry na proužky prstů nebo na kůži robotického prstu. Obecná funkce jako Pacinianovy krvinky u lidí a mají stejně velká příslušná pole, takže pro celý prst stačí jeden nebo dva akcelerometry kůže. Tyto senzory účinně detekují vznik a přerušení kontaktu, vibrace spojené s klouzáním po strukturovaných površích.

Dynamický senzor
Snímač rychlosti stresu je druhým typem dynamického hmatového snímače. Pokud koneček prstu klouže rychlostí několika cm / s celkově malých hrbolků nebo jam na povrchu, staly se důležité dočasné změny na pokožce. Piezoelektrický polymer, jako je PVDF, vytváří náboj v reakci na poškození, které lze aplikovat na produkci proudu, který je přímo úměrný rozsahu změny.
Tepelný senzor
Tepelné senzory jsou důležité pro schopnost člověka identifikovat materiály vyrobených předmětů, ale některé se používají také v robotice. Tepelné snímání zahrnuje detekci tepelných gradientů v kůži, které odpovídají jak teplotě, tak tepelné vodivosti objektu. Robotické tepelné senzory jsou zapojeny do Peltierových křižovatek v kombinaci s termistory .

Tepelný senzor
Pracovní princip a obvodové schéma hmatového senzoru
Hmatové senzory jsou vyvinuty tak, aby poskytovaly hmatové snímací schopnosti pro teleoperační manipulátory a inteligentní roboty. Hmatové senzory mohou identifikovat normální sílu aplikovanou na hmatové pixely pro hypnotizaci řízení síly a hmatových obrazů a pro generování rozpoznávání objektů. Pro získání hmatových obrazů a normálních sil je však informace tangenciální rozhodující pro řízení sil a prevenci skluzu, což je hypnotizující pro úspěch úkolu - proto jsou zapotřebí trojrozměrné hmatové senzory.

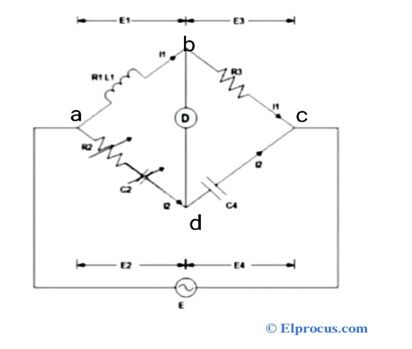
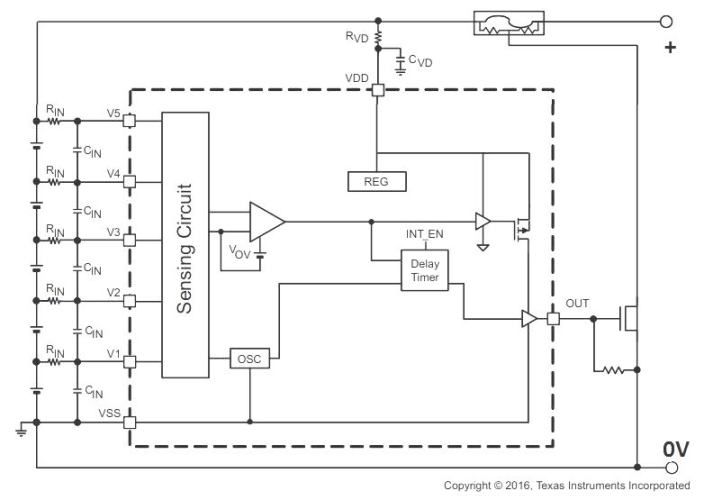
Schéma zapojení hmatového senzoru
Existuje několik trojrozměrných hmatových senzorů vyvinutých pomocí piezorezistivních, kapacitních a volitelných snímacích prvků a tyto hmatové senzory jsou vyráběny Technologie MEMS . Integrované snímací prvky a obvody předzpracování jsou pro kompaktnost, ale jsou pro většinu aplikací příliš slabé a snadno se rozbijí a například rozsah síly dotykového senzoru je pouze 0,01 N w4x a ostatní dotykové senzory nejsou poskytované technologií MEMS. Níže uvedené schéma zapojení ukazuje obvod hmatového snímače.
Hmatový senzor v robotice
Hmatový senzor používaný v robotech NASA je uveden níže
- Jeden z příkladů přímo souvisejících s průzkumem planet.
- NASA používá tyto senzory na mezinárodní vesmírné stanici k pomoci lidem s opravami / údržbou v životním prostředí
- NASA vyzkoušela v robotice mnoho hmatových senzorů, které jsou v počáteční fázi. Použili Rezistor snímající sílu a nyní se používají kvantové tunelové kompozity
- Vícenásobná zátěžová tlačítka a buňky jsou praxí pro vývoj hmatových senzorů vyráběných průmyslovým robotem
Hmatové senzorové aplikace
Dotek aplikace senzorů jsou používány v
- Robotika
- Počítačový hardware
- Bezpečnostní systém
- Dotyková obrazovka zařízení na mobilním telefonu
- Výpočetní
Výhody hmatového senzoru
Výhody hmatového senzoru jsou uvedeny níže:
- Nabízejí snadno použitelná řešení hmatových senzorů
- Hmatový senzor nemá žádné externí komponenty a kabely
- Kompaktní extrakce
- Ověřená technologie hmatového snímání z robotiky.
Jedná se o pracovní princip a aplikace hmatového senzoru. Doufáme, že dané informace pomohou při poskytování dobrých informací a porozumění projektu. Dále, pokud máte jakékoli dotazy týkající se tohoto konceptu na elektrické a elektronické projekty , můžete komentovat v níže uvedené sekci. Zde je otázka pro vás - jaké jsou funkce hmatových senzorů?
Fotografické kredity:
- Hmatový senzor čtvercový prostor
- Senzor síly / momentu transdukční techniky
- Dynamický senzor nonius
- Tepelný senzor obrázky-amazon





{kind=link}
{kind=link}
{kind=link}