V elektrických systémech používáme buď v průmyslových odvětvích, elektrárny nebo domácí potřeby, motory a generátory se staly běžnou věcí. S požadavkem na vysoce energeticky účinné a méně náročné systémy je vidět vynález nových modelů těchto elektrických zařízení. Základním výpočtovým faktorem pro spolehlivý provoz motorů a generátorů je Faktor síly . Je to poměr aplikovaného výkonu k požadovanému výkonu. Celková spotřeba energie v průmyslových odvětvích a továrnách se obvykle počítá na základě účiníku. Účiník by tedy měl být vždy udržován na jednotě. Ale kvůli nárůstu jalového výkonu v těchto zařízeních se účiník snižuje. K udržení účiníku na jednotě je zavedeno mnoho metod. Koncept synchronního motoru je jedním z nich.
Co je synchronní motor?
Definice synchronního motoru uvádí, že „An Třífázový motor ve kterém je v ustáleném stavu rotace hřídele synchronizována s frekvencí aplikovaného proudu “. Synchronní motor pracuje jako střídavý motor, ale zde se celkový počet otáček hřídele rovná celočíselnému násobku frekvence aplikovaného proudu.

Synchronní motor
Synchronní motor se při práci nespoléhá na indukční proud. V těchto motorech jsou na rozdíl od indukčních motorů přítomny vícefázové střídavé elektromagnety stát r , který vytváří rotující magnetické pole. Zde je rotor permanentního magnetu, který se synchronizuje s rotujícím magnetickým polem a otáčí se synchronně s frekvencí proudu, který je na něj aplikován.
Návrh synchronního motoru
Stator a rotor jsou hlavní součásti synchronního motoru. Zde má statorový rám obalovou desku, ke které jsou připevněny klíčové lišty a obvodová žebra. Pro podporu stroje se používají patky, úchyty rámu. K buzení vinutí pole pomocí DC se používají sběrací kroužky a kartáče.
Válcové a kulaté rotory se používají pro 6pólové použití. Pokud je zapotřebí většího počtu pólů, používají se rotory s výběžky. Konstrukce synchronního motoru a synchronního alternátoru jsou podobné.
Princip fungování synchronního motoru
Práce synchronních motorů závisí na interakci magnetického pole statoru s magnetickým polem rotoru. Stator obsahuje 3fázová vinutí a je napájen 3fázovým napájením. Statorové vinutí tedy vytváří 3fázové rotující magnetické pole. Stejnosměrné napájení je dáno rotoru.
Rotor vstupuje do rotujícího magnetického pole produkovaného vinutím statoru a synchronně se otáčí. Nyní rychlost motoru závisí na frekvenci dodávaného proudu.
Rychlost synchronního motoru je řízena frekvencí aplikovaného proudu. Rychlost synchronního motoru lze vypočítat jako
Ns = 60f / P = 120f / p
kde f = frekvence střídavého proudu (Hz)
p = celkový počet pólů na fázi
P = celkový počet párů pólů na fázi.
Pokud je aplikováno zatížení větší než průrazné, motor se desynchronizuje. Třífázové statorové vinutí poskytuje výhodu určování směru otáčení. V případě jednofázového vinutí není možné odvodit směr otáčení a motor se může rozběhnout v obou směrech. K řízení směru otáčení v těchto synchronních motorech je zapotřebí počáteční uspořádání.
Metody spouštění synchronního motoru
Moment setrvačnosti rotoru zastaví samočinné spouštění velkých synchronních motorů. Kvůli této setrvačnosti rotoru není možné, aby se rotor synchronizoval s magnetickým polem statoru v okamžiku, kdy je aplikován samotný výkon. K synchronizaci rotoru je tedy zapotřebí nějaký další mechanismus.
Indukční vinutí je součástí velkých motorů, které generují dostatečný točivý moment potřebný pro zrychlení. U velmi velkých motorů se pro urychlení nezatíženého stroje používá poníkový motor. Při změně frekvence proudu statoru mohou elektronicky ovládané motory zrychlovat i při nulové rychlosti.
U velmi malých motorů, u nichž je žádoucí, aby moment setrvačnosti rotoru a mechanické zatížení byly malé, mohou startovat bez jakýchkoli způsobů spouštění.
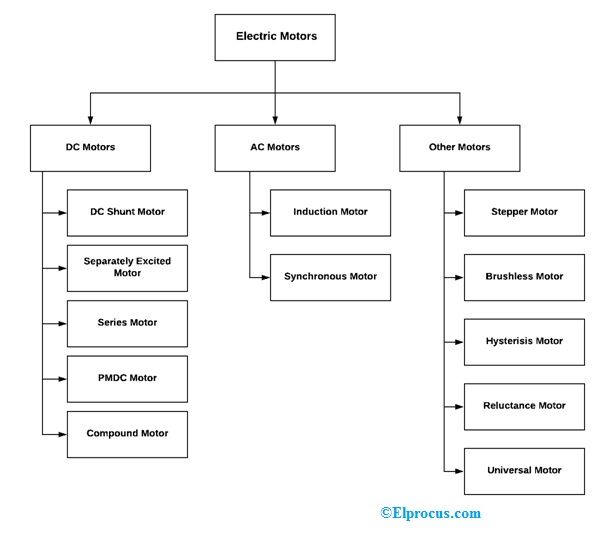
Typy synchronního motoru
V závislosti na metodě magnetizace rotoru existují dva typy synchronních motorů -
- Bez vzrušení.
- Stejnosměrný proud vzrušený.
Nevzrušený motor
U těchto motorů je rotor magnetizován vnějším statorovým polem. Rotor obsahuje konstantní magnetické pole. K výrobě rotoru se používá vysoce retenční ocel, jako je kobaltová ocel. Ty jsou klasifikovány jako motory s permanentním magnetem, neochota a hystereze.
- U synchronních motorů s permanentními magnety se pro konstrukci rotoru používá spolu s ocelí permanentní magnet. Mají v rotoru konstantní magnetické pole, takže pro spuštění nelze použít indukční vinutí. Používá se jako bezpřevodové výtahové motory.

Synchronní motor s permanentními magnety
- U motoru Reluctance je rotor vyroben z ocelového odlitku s vyčnívajícími hroty s hroty. Aby se minimalizovalo zvlnění točivého momentu, jsou póly rotoru menší než póly statoru. Obsahuje navíjení klece veverky, které poskytuje počáteční točivý moment rotoru. Používá se v přístrojových aplikacích.
- Hysterezní motory jsou samočinné motory. Zde je rotorem hladký válec vyrobený z magneticky tvrdé kobaltové oceli s vysokou koercitivitou. Tyto motory jsou drahé a používají se tam, kde je požadována přesná konstantní rychlost. Obecně se používá jako servomotory.
Stejnosměrný proudový motor
Zde je rotor buzen pomocí stejnosměrného proudu dodávaného přímo přes sběrací kroužky. Používají se také střídavé indukce a usměrňovače. Obvykle mají velké velikosti, například větší než 1 koňská síla atd.

Aplikace synchronních motorů
obvykle, synchronní motory se používají pro aplikace, kde je vyžadována přesná a konstantní rychlost. Nízkoenergetické aplikace těchto motorů zahrnují polohovací stroje. Ty se také používají v robotu pohony . Kuličkové mlýny, hodiny, gramofony gramofonu také využívají synchronní motory. Kromě těchto motorů se také používají jako servomotory a rozvodové stroje.
Tyto motory jsou k dispozici v rozsahu velikostí zlomkové podkovy až po vysoce výkonné průmyslové velikosti. Při použití v průmyslových velikostech s vysokým výkonem plní tyto motory dvě důležité funkce. Jeden je jako účinný prostředek k přeměně střídavé energie na mechanickou energii a druhý je Korekce účiníku . S jakou aplikací servomotoru jste se setkali?