Příspěvek pojednává o jednofázovém frekvenčním měniči nebo obvodu VFD pro řízení rychlosti střídavého motoru bez ovlivnění jejich provozních specifikací.
Co je to VFD
Motory a další podobné indukční zátěže konkrétně nemají „rády“ provoz s frekvencemi, které nemusí být v rámci jejich výrobních specifikací, a mají tendenci se stát hodně neefektivními, pokud jsou za takových abnormálních podmínek nuceny.
Například motor určený pro provoz s 60 Hz nemusí být doporučen pro práci s frekvencemi 50 Hz nebo jinými rozsahy.
Pokud tak učiníte, může dojít k nežádoucím výsledkům, jako je zahřátí motoru, nižší nebo vyšší než požadované otáčky a neobvykle vysoká spotřeba, což způsobí, že věci budou velmi neúčinné a sníží se životnost připojeného zařízení.
Provoz motorů za různých podmínek vstupní frekvence se však často stává nutkáním a v takových situacích může být velmi užitečný obvod VFD nebo frekvenční měnič.
VFD je zařízení, které umožňuje uživateli řídit rychlost střídavého motoru úpravou frekvence a napětí vstupního napájení podle specifikací motoru.
To také znamená, že VFD nám umožňuje provozovat jakýkoli střídavý motor prostřednictvím jakéhokoli dostupného síťového střídavého napájení bez ohledu na jeho specifikace napětí a frekvence, vhodným přizpůsobením frekvence a napětí VFD podle specifikací motoru.
To se obvykle provádí pomocí daného ovládání ve formě variabilního knoflíku se stupnicí s různou frekvenční kalibrací.
Vytvoření VFD doma může znít jako obtížný návrh, nicméně pohled na design navržený níže ukazuje, že koneckonců není tak těžké postavit toto velmi užitečné zařízení (navržené mnou).
Obvodový provoz
Obvod lze v zásadě rozdělit na dva stupně: Poloviční stupeň budiče a stupeň PWM logického generátoru.
Stupeň polovičního můstku využívá poloviční můstek IC IR2110, který se jednou rukou stará o vysokonapěťový motorový stupeň s dvěma vysokofrekvenčními a nízkofrekvenčními mosfety.
Řidič IC tedy tvoří srdce obvodu, ale pro implementaci této zásadní funkce vyžaduje jen několik komponent.
Výše uvedený IC by však potřeboval vysokou logiku a nízkou logiku ve frekvencích pro řízení připojené zátěže na požadované specifické frekvenci.
Tyto hi a lo vstupní logické signály se stávají provozními daty pro IC řidiče a musí zahrnovat signály pro určení specifikované frekvence i PWM ve fázi se síťovým střídavým proudem.
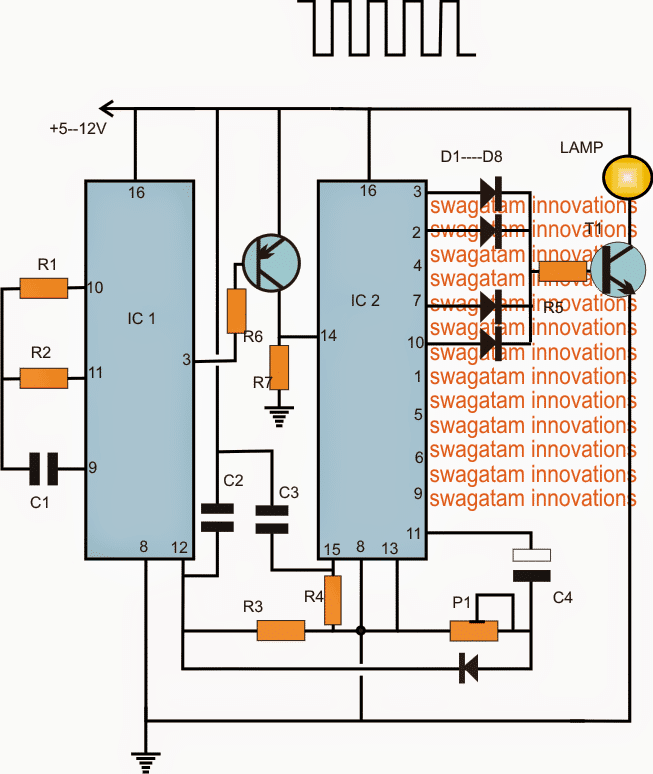
Výše uvedené informace jsou vytvořeny další fází zahrnující pár 555 integrovaných obvodů a desetileté počítadlo. IC 4017.
Dva 555 integrované obvody jsou zodpovědné za generování modifikovaných sinusových vln PWM odpovídajících plnému vlnovému střídavému vzorku odvozenému ze sestupného výstupu můstkového usměrňovače.
IC4017 funguje jako generátor logiky výstupu totemového pólu, jehož frekvence střídavého kmitočtu se stává parametrem obvodu určujícím HLAVNÍ frekvenci.
Tato určující frekvence je vyňata z kolíku # 3 IC1, který také napájí spouštěcí kolík IC2, a pro vytváření modifikovaných PWM na kolíku # 3 IC2.
Modifikované sinusové vlny PWM jsou skenovány na výstupech 4017 IC před napájením IR2110, aby se překrýval přesný „tisk“ modifikovaných PWM na výstupu ovladače polovičního můstku a nakonec pro motor, který je provozován.
Hodnoty Cx a 180k pot by měly být vhodně zvoleny nebo upraveny, aby motor poskytoval správnou specifikovanou frekvenci.
Vysoké napětí na odtoku vysokofrekvenčního mosfetu musí být také odpovídajícím způsobem vypočítáno a odvozeno úpravou dostupného síťového napětí střídavého proudu po jeho vhodném zvýšení nebo snížení podle specifikací motoru.
Výše uvedená nastavení určí správné volty na Hertz (V / Hz) pro konkrétní motor.
Napájecí napětí pro oba stupně může být vytvořeno do společného vedení, stejného pro uzemnění.
TR1 je sestupný transformátor 0-12V / 100mA, který dodává obvodům požadované provozní napájecí napětí.
Řídicí obvod PWM

Budete muset vhodně integrovat výstupy z IC 4017 z výše uvedeného diagramu do vstupů HIN a LIN následujícího diagramu. Připojte také označené diody 1N4148 ve výše uvedeném schématu s nízkoobvodovými hradly MOSFET, jak je znázorněno na následujícím schématu.
Řidič motoru Full Bridge

Aktualizace:

Výše diskutovaný jednoduchý design jediného VFD lze dále zjednodušit a vylepšit pomocí samostatně oscilačního úplného můstku IC IRS2453, jak je znázorněno níže:
Zde je IC 4017 zcela vyloučen, protože měnič ful bridge je vybaven vlastním oscilátorem, a proto není pro tento IC vyžadováno žádné externí spouštění.
Jelikož je konstrukce s úplným můstkem, řízení výstupu motoru má plný rozsah nastavení od nuly do maximální rychlosti.
Hrnec na pinu č. 5 IC 2 lze použít k řízení rychlosti a točivého momentu motoru pomocí metody PWM.
Pro řízení rychlosti V / Hz lze Rt / Ct přidružené k IRS2453 a R1 přidružené k IC1 vyladit (ručně) pro získání příslušných výsledků.
Zjednodušení ještě více

Pokud zjistíte, že celá část mostu je ohromující, můžete ji nahradit obvodem plného mostu založeného na P, N-MOSFET, jak je uvedeno níže. Tento ovladač s proměnnou frekvencí používá stejný koncept s výjimkou sekce s plným můstkem, která využívá MOSFET P-kanálu na vysoké straně a N-kanálové MOSFETY na nízké straně.
Přestože konfigurace může vypadat neefektivně kvůli zapojení MOSFETů s P-kanálem (kvůli jejich vysokému hodnocení RDSon), může použití mnoha paralelních P-MOSFET vypadat jako efektivní přístup k řešení problému s nízkým RDSon.
Zde se 3 MOSFETy používají paralelně pro zařízení s kanálem P, aby se zajistilo minimalizované zahřívání zařízení na stejné úrovni jako u protějšků v kanálu N.
Předchozí: Jak chránit MOSFETy - vysvětlení základů Další: I / V Tracker Circuit pro solární MPPT aplikace