V tomto příspěvku prozkoumáme technické specifikace a podrobnosti o pinu IC L293, což je univerzální čtyřpolohový IC ovladač IC a lze jej použít k implementaci mnoha zajímavých motorů řidičský obvod aplikace, například pro provoz motorů, solenoidů a jiných indukčních zátěží (4 jednotky samostatně nebo v párech v režimu push-pull).
Jak to funguje
IC L293 v zásadě obsahuje dva páry výstupů, které lze nezávisle použít pro provoz dvou samostatných zátěží v režimu push-pull nebo obousměrně, označovaný také jako režim totemového pólu. Alternativně může být tento pár párů výstupů individuálně slouží k jednosměrnému provozu 4 jednotlivých zátěží.
Výše uvedené operace zátěží jsou řízeny prostřednictvím příslušných vstupních vývodů, spouštěných z externího obvodu oscilátoru nebo a Zdroj PWM .
Například pokud je vyžadováno, aby zátěž byla provozována způsobem totemového pole, odpovídající vstupy dvou fází budiče IC by mohly být spuštěny z externího oscilátor, například pár branami NAND , přičemž jedna brána může být zapojena jako oscilátor, zatímco druhá jako invertor.
Dva antifázové signály z nich Brány NAND pak by mohl být spojen se vstupy L293 pro provoz příslušných výstupů způsobem totemového pólu (push-pull), což by zase vedlo připojenou zátěž stejným způsobem.
Přiřazení pinů IC L293
Nyní se naučíme funkce pinout IC L293 odkazem na následující diagram a z následujícího vysvětlení:

Pin # 2 je řídicí vstup, který ovládá výstupní pin # 3.
Podobně je pin # 7 řídicím vstupem pro výstupní pin # 6.
Pin # 1 se používá k povolení nebo zakázání výše uvedených sad vývodů. Pozitivní na pinu # 1 udržuje výše uvedené sady vývodů aktivní a aktivní, zatímco záporné napájení nebo napájení 0 V je okamžitě deaktivuje.
Docela shodně se Pin # 15 a Pin # 10 stávají řídicími vstupy pro odpovídající výstupy Pin # 14 a Pin # 11 a zůstávají funkční, pouze pokud je pin # 9 udržován na pozitivní logice a je deaktivován, když je logika 0V aplikován na tento pinout.
Jak již bylo vysvětleno dříve, pin # 3 a pin # 6 lze použít jako páry totemových pólů napájením antifázového logického signálu na jejich vstupní piny # 7 a piny # 2. To znamená, že když je pin # 2 napájen pozitivní logikou, pin # 7 musí být v negativní logice a naopak.
To umožní výstupům pin # 6 a pin # 3 ovládat připojenou zátěž v odpovídajícím směru a naopak, když jsou vstupní logické signály obráceny, je také obrácena polarita zátěže a začne se otáčet v opačném směru.
Pokud se tato sekvence rychle přepne, pak zátěž pracuje odpovídajícím způsobem sem a tam nebo push-pull způsobem.
Výše uvedená operace může být replikována také na druhé straně dvojice ovladačů.
Vcc nebo napájecí kladné vstupy pro IC jsou konfigurovány samostatně pro dva různé napájecí vstupy.
Pin # 16, (Vcc1) se používá k ovládání pinů povolení a k ovládání dalších interních logických fází integrovaného obvodu, a to by mohlo být napájeno vstupem 5 V, i když maximální omezení je 36 V
Kolík č. 8 (Vcc2) se používá speciálně pro napájení motorů a lze jej napájet cokoli od 4,5 V do 36 V
Elektrická specifikace IC L293
IC L293 je navržen tak, aby fungoval s jakýmkoli napájením mezi 4,5 V a 36 V, se specifikací maximálního zpracování proudu nejvýše 1 zesilovač (2 A v pulzním režimu, max.
Proto lze jakoukoli zátěž ve výše uvedených specifikacích provozovat napříč diskutovanými výstupy IC L293.
Logika řízení vstupu by neměla být překročena nad 7 V, ať už jako trvalé napájení nebo napájení PWM.
Použití L293 IC pro ovládání motoru aplikací
Nyní se naučíme, jak implementovat obvody řadičů motoru pomocí IC L293 prostřednictvím různých provozních režimů a pomocí až 4 motorů se samostatným ovládacím zařízením.
V našem předchozím příspěvku jsme studovali podrobnosti zapojení a fungování IC L293, zde se dozvídáme, jak lze stejný IC použít pro ovládání motorů prostřednictvím konkrétních režimů a konfigurací.
Režimy ovládání
IC L293 lze použít k ovládání motorů v následujících režimech:
1) 4 motory prostřednictvím nezávislých PWM vstupů.
2) 2 motory v obousměrném nebo totemovém režimu s regulací otáček pomocí PWM
3) Jeden dvoufázový motor BLDC využívající vstup PWM
Obrázek níže ukazuje, jak lze IC použít k ovládání motorů s nezávislým ovládáním, a také to, jak lze použít jeden motor k dosažení obousměrné ovládání :

Levá strana IC ukazuje motor konfigurovaný pro práci v obousměrném režimu. Aby bylo zajištěno, že se motor točí v jednom ze zvolených směrů, musí být pin # 1 a pin # 7 použity s antifázovým 5V DC vstupem. Pro změnu směru otáčení motoru lze změnit polaritu 5V napříč uvedenými vstupními vývody.
Pin # 1 musí být udržován na logicky vysoké hodnotě, aby motor a IC fungovaly stále, logika 0 zde okamžitě zastaví motor.
Napájení na vstupních ovládacích vstupech může být ve formě PWM, což lze dodatečně použít pro ovládání rychlosti motoru od 0 do maxima jednoduše změnou pracovního cyklu PWM.
Pravá strana integrovaného obvodu zobrazuje uspořádání, při kterém je několik motorů ovládáno nezávisle prostřednictvím nezávislých vstupů PWM na příslušných pinech # 15 a Pin # 10.
Pin 9 musí být udržován na logicky vysoké hodnotě, aby motor a IC fungovaly. Logická nula na tomto pinoutu se okamžitě zastaví a deaktivuje funkci připojených motorů.
Vzhledem k tomu, že levá strana a pravá boční část integrovaného obvodu jsou identické s detaily jejich fungování pinout, zobrazené uspořádání motorů by mohlo být zaměněno přes příslušné pinouty, aby se dosáhlo identického fungování, jak je vysvětleno výše, což znamená, že dva jednotlivé motory mohou být připojeny k levá strana IC přesně tak, jak je implementováno na pravé straně IC v diagramu.
Podobně by mohl být obousměrný systém zabudován na pravou stranu vývodů IC přesně tak, jak je dosaženo na levé straně IC ve výše uvedeném diagramu.
Výše uvedený příklad ukazuje, jak lze IC L293 použít k ovládání 4 motorů jednotlivě nebo 2 motorů v obousměrném režimu a jak lze také řídit otáčky pomocí posuvu PWM na příslušných vstupních vývodech IC.
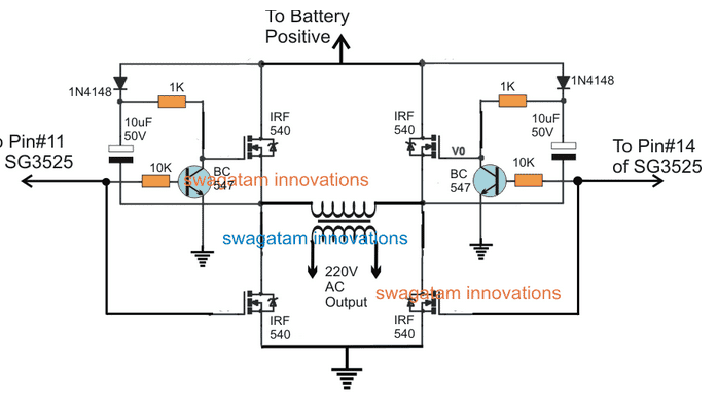
Použití L293 k ovládání 2fázového motoru BLDC

Na výše uvedeném obrázku vidíme, jak lze IC L293 konfigurovat pro ovládání 2fázového BLDC motoru pomocí naznačených vývodů a prostřednictvím několika řídicích vstupů zobrazených jako řízení A a řízení B.
Na výstupech integrovaného obvodu je vidět připojený jeden dvoufázový motor, zatímco vstupy jsou zapojeny pomocí sady hradel NOT, které jsou odpovědné za vytvoření požadované antifázové vstupní logiky pro řízení motoru.
Body Control A a Control B mohou být vystaveny střídavé logice umožňující správné otáčení dvoufázového motoru.
Polarita střídavé logiky určuje směr otáčení motoru.
Pro dosažení lineárního řízení otáček na motoru by mohla být implementována logická forma PWM napříč vstupy řízení A a řízení B a jeho pracovní cyklus by se mohl měnit pro dosažení požadovaného řízení otáček na připojeném motoru.
Pokud máte další pochybnosti ohledně technických specifikací nebo datového listu nebo podrobností IC o pinoutu, můžete kdykoli pro okamžité odpovědi komentovat níže.
Předchozí: Bezdrátový teploměr využívající RF spojení 433 MHz pomocí Arduina Další: Univerzální obvod ESC pro motory BLDC a alternátory