A Multirotorický dron je typ UAV s různými rotory, jako jsou čtyři rotory, šest rotorů, osm rotorů nebo ještě více, na základě jejich designu a používání. Ale další rotory tohoto dronů mohou zvýšit kapacitu užitečného zatížení, čas letu, stabilitu atd. Jsou to nejlevnější a nejjednodušší drony , poskytuje vysokou kontrolu nad rámováním a polohou. Jsou tedy ideální pro dohled a leteckou fotografii. Multirotorické drony jsou k dispozici v různých typech, jako je Trimotor, kvadrotor, hexakoptéra, chobotnice a koaxiální multi-rotorové drony. Jedná se o nejběžnější typy UAV a každý typ dronu se liší v jeho výkonu, designu a schopnostech. Tento článek rozbíhá na jednom z typů multirotorových dronů, jako je kvadrokoptéra, jeho práce a aplikace.
Co je kvadrokoptéra?
Kvadrokoptéra je typ UAV, který je poháněn čtyřmi rotory , kde každý rotor má motor a vrtule. Krovný robot využívá čtyři rotory pro výtah a pohon, takže může vzlétnout a vertikálně přistát a driftovat na místě. Takže dva rotory tohoto dronu se točí ve směru hodinových ručiček, zatímco další dva rotory točí proti směru hodinových ručiček, aby zrušily točivý moment a poskytly konstantní kontrolu letu. To lze ovládat ručně nebo nezávisle, takže je to jeden z nejpopulárnějších typů dronů kvůli jeho jednoduchosti, stabilitě a manévrovatelnosti.
Karkopéry jsou diferencovány jejich čtyřčutým designem pro kontrolu pokročilé aerodynamiky, mechaniky a elektroniky. Jeho exkluzivní design poskytuje manévrovatelnost a vynikající stabilitu než obvyklé jednorotorové vrtulníky.
Historie kvadrokoptéry:
Kvadrokoptéra je typ multihototorového dronu, který se rozsáhle vyvinul ze svých raných návrhů. Konkurentní historie kvadrokoptéry je tedy diskutována níže.
- Jacques a Louis Bréguet v roce 1907 vyvinuli a testovali gyroplane č. 1. Je to myšlenka rané kvadrokoptéry, která dosahuje vzletu, ale čelí nestabilitě založené na leteckých systémech křížových čepelů.
- Etienne Oehmichen vytvořila v roce 1920 další časný kvadrokoptéru, jako je Oehmichen, který demonstruje lety a stanovení globálního rekordu.
- V americkém námořnictvu z roku 1930 experimentoval s rádiově kontrolovaným letadlem, které vedlo k vývoji dronů Curtiss N2C-2.
- Bell Boeing Quad Tiltrotor v roce 1990 kombinoval jak návrhy s pevným křídlem, tak pro vojenské dopravní aplikace.
- Amazon navrhl v roce 2013 komerční technologii dronů pro doručovací systém
- Airbus vyvinul kvadrokoptéru napájenou baterií v roce 2018 pro městské vzduchové taxíky, aby se v určitém okamžiku zaměřila na autonomní provoz.
- V současné době se tyto drony používají široce pro různé účely, jako je rekreační létání, letecké fotografie, doručení, dohled atd.
Komponenty kvadrokoptéry
Kvadrokoptéra je navržena s několika klíči komponenty , které jsou vysvětleny níže.

Rám
Rám kvadrokoptéry má ramena, které drží motory, baterie, letový ovladač atd.
Motory
Kvadrokoptéra obsahuje čtyři motory, které se používají k jeho zvednutí. Na trhu však jsou k dispozici různé druhy motorů.
ESC
Od kvadrokoptéry motory Obecně vyžadují 3 3-fázové dodávky, nemůžeme jej použít jako přímý zásobu. Vyžadujeme tedy, aby ESC změnila signály řadiče a poslalo je do motorů, aby ovládala jejich rychlost.
Vrtule
Vrtule jsou významnou součástí dronu. Jedná se o spřádací čepele, které fungují jako křídla na vašem dronu, a vytvářejí proudění vzduchu, aby zvedli váš dron do vzduchu.
Letový ovladač
Hlavní funkcí letového řadiče je nasměrovat RPM každého motoru v reakci na vstup. Pilotní příkaz pro čtyřkolku tedy pomáhá pohybovat se vpřed a je přiváděn do leturního ovladače, aby rozhodl, jak ovládat motory, následně.
RC vysílač a přijímač
Ovládací prvky rádia a přijímače elektřina , což má za následek užitečný přenos dat prostřednictvím prostoru nebo atmosféry. Používají rádiové signály k bezdrátovému odesílání příkazů prostřednictvím nastavené rádiové frekvence nad rádiovým přijímačem. Je tedy připojen k letovému řadiči kvadrokoptéry, který je vzdáleně kontrolován.
Baterie
Kvadrokoptéra používá zdroj energie baterie k řízení všech systémů vašeho robota tím, že mu umožní létat. Konečně je k napájení kvadrokoptéry potřebná baterie lithium polymer (lipo), takže doba letu kvadrokoptéry závisí hlavně na kapacitě baterie. Výběr baterie závisí hlavně na její velikosti, napětí, hodnocení C, kapacitě atd.
Smíšený
Různé zahrnuje malé příslušenství, jako jsou různé kabely propojky a konektory kulky, díky nimž je vaše kvadrokoptéra dokonalá a stabilnější.
Jak funguje kvadrokoptéra?
Karkopéry mohou létat se čtyřmi rotory, kde každý zahrnuje motor a vrtule k produkci zvedání a kontroly pohybu ve vzduchu. Tyto drony mohou dosáhnout letu změnou rychlosti každého rotoru, čímž ovlivňují množství generovaného výtahu a tahu tím, že umožňují kontrolovaný pohyb ve všech směrech.
Let kvadrokoptéry se spoléhá na princip tahu a přesného řízení čtyř rotorů. Tady je tedy rozpis jeho práce.
- Jakmile se všechny čtyři rotory točí, pak produkují proudění vzduchu dolů a strčí nahoru. Kdykoli generovaný součet rotorů překročí hmotnost čtyřkolku, pak se rozběhne.
- Aby se driftoval na místě, letový ovladač mění všechny čtyři rychlosti rotoru, aby vytvořil dostatečný tah, aby kompenzoval gravitaci.
- Rychlost čtyř rotorů se stejně zvyšuje, aby se ve srovnání s hmotností generovala větší tah. Rychlost se tedy sníží na sezení.
- Zadní rotory se točí snadněji a pohybují se dopředu než přední rotory a naklonění kvadrokoptéry vpřed vytváří tah. Rychlost zpětného pohybu předních rotorů lze dosáhnout zvýšením.
- Pravá boční rotory tohoto dronu se točí rychleji, aby se pohybovaly doleva než levé rotory, a naklonit kvadrokopter dron doleva. Zde může být pohyb na pravé straně dosažen zvýšením rychlosti levého rotoru.
- Aby se otočil zkrácením ve směru hodinových ručiček, dva rotory, které jsou diagonálně opakem, se otáčí rychleji, zatímco další dva rotory se točí pomaleji, čímž vytvářejí rotující sílu. Zvrácením toho lze dosáhnout rotace proti směru hodinových ručiček.
- Data senzoru lze neustále monitorovat letovému řadiči. Takže způsobuje mikro-úpravy rychlosti každého motoru, aby udržovala stabilitu a provedl příkazy pilota.
Typy kvadrokoptérů
Na trhu jsou k dispozici různé typy kvadrokoptérů na základě jejich tvarů rámců a zamýšlených použití, které jsou vysvětleny níže.

X kvadrokoptéra nebo x-konfigurace:
Tento typ kvadrokoptéry má nejoblíbenější design, který poskytuje dobrou rovnováhu stability a manévrovatelnost. Používá se v různých aplikacích, jako je videografie, závody, letecká fotografie, akrobatické létání, FPV Racing,
H kvadrokoptéra nebo konfigurace H:
H kvadrokoptéra má rám ve tvaru H, který poskytuje lepší stabilitu. Tento dron tedy lze použít při letecké fotografii založené na Devopedii.
+ Konfigurace kvadrokoptéry nebo +:
Tento kvadrokoptéru vyniká v přímých letových pruzích, včetně aerodynamicky účinných pozic vrtule, často používaných v akrobatickém létání. Používá se v jednodušších kontrolních schématech určitých aplikací.
Konfigurace kvadrokoptéry Y4 nebo Y4:
Tento dron je podobný trikoptéru se třemi pažemi, ale jeho zadní rameno obsahuje dva motory, které jsou koaxiálně namontovány pro lepší kontrolu a zvedání a zvedání.
A-Tail nebo V-Tail kvadrokoptéra:
Tento dron je podobný Y4quadcopteru, s výjimkou zadních motorů umístěných pod úhlem ve tvaru A nebo V, který poskytuje větší kontrolu narážení.
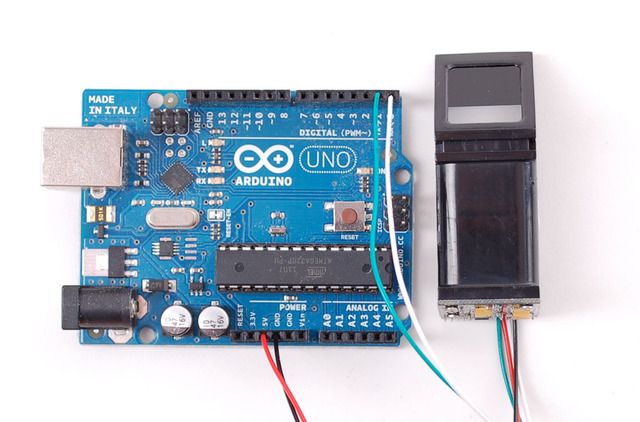
Kvadrokoptéra pomocí Arduino
Letový ovladač je mozek kvadrokoptéry. Obecně platí, že na trhu je k dispozici také mnoho předem plachých letových řadičů s nižšími náklady. Níže je tedy zobrazen letový ovladač navržený s Arduino pro kvadrokoptéru. Multiwii je slavný software pro řadič letu používaný pro kvadrokoptéry pro kutily.
Pojďme tedy navrhnout kvadrokoptéru s Arduino, jak je ukázáno níže. Nejedná se pouze o kvadrokoptéru, ale také o otevřený zdroj. Požadované komponenty k výrobě tohoto kvadrokoptéra pomocí Arduino zahrnují: ESC, Bluetooth , MPU-6050, 330-OHM rezistor, LED indikátor, přijímač, Arduino Nano R3 a spojující dráty.

Spojení:
Spojení tohoto rozhraní následuje jako;
- Připojte d3 pin arduino nano k signálnímu kolíku ESC 1.
- Připojte d9 pin arduino nano k signálnímu kolíku ESC 3.
- Připojte kolík D10 Arduino nano k signálnímu kolíku ESC 2.
- Připojte kolík D11 Arduino nano k signálnímu kolíku ESC 4.
- Připojte kolík TX modulu Bluetooth k Rx PIN arduino.
- Připojte Rx PIN modulu Bluetooth k kolíku TX Arduino.
- Arduino A4 pin je připojen k pin SDA MPU-6050.
- Arduino A5 pin je připojen k pin SCL MPU-6050.
- Připojte jeden terminál LED k pin D8 Arduino a druhý terminál k napájení pomocí rezistoru.
- Arduino D2 Pin je připojen k škrticímu čepu přijímače.
- Připojte kolík D4 Arduino k Eleronovi PIN přijímače.
- Arduino D5 pin je připojen k kolíku Ailerons přijímače.
- Arduino D6 PIN je připojen k kolíku kormidla přijímače.
- Arduino D7 PIN je připojen k pinku AUX 1 přijímače.
Pracovní
Nyní spojte všechny pozemky s pozemními terminály Arduina. Zahrnuje tedy všechny pozemky přijímače, modul Bluetooth, Grounds a MPU Grounds. Poté zadejte připojení zdroje napájení 5V připojením GND baterie s GND všech komponent. Červený barevný vodič je připojen k arduino, 5V modulu, Bluetooth modulu a MPU.
Nyní dodávejte desku a Arduino je připraveno přidat kód přes počítač. Normálně letový řadič Arduino pracuje s některým počítačovým programováním. K tomu musíte nejprve stáhnout MultiWII 2.4 a kód si můžete stáhnout přímo.
Jedná se o velmi oblíbený software FC používaný pro multi-rotory prostřednictvím velké komunity. Protože tento software podporuje celou řadu multi-copters s vynikajícími funkcemi, jako je Bluetooth Control s vaším smartphonem, barometrem, OLED displejem, GPS Pozice Hold & Return do Home, Magnetometer, LED proužky atd.
Okamžitě si všimnete, jak přesunete letový řadič, na obrazovce lze zaznamenat hodnoty dat akcelerometru a gyroskopu. Orientace FC je tedy vidět dole. V tomto rozhraní můžete změnit hodnoty PID signálu a upravit kvadrokoptéru tak, aby se rovnaly vašim osobním preferencím. V tomto propojení mohou být režimy letu také přiřazeny k určitým pomocným polohám přepínače. Nyní vše, co musíte udělat, je najít polohu pro váš letový ovladač Arduino na rámečku, který je nastaven tak, aby zasáhl nebe.
ARDUINO FAKCOPTER pracuje se všemi požadovanými komponenty, aby vytvořil tah umožněním letu a manévrovatelnosti. Takže Arduino MicroController funguje jako letový ovladač, který získává vstup a posílá signály do ESC, aby získali požadované pohyby, jako je stoupání, vznášení, otáčení a padání.
V zásadě sloučí kvadrokoptéru Arduino hardware se softwarem pro výrobu létajícího stroje. Provádí tedy celou řadu manévrů v závislosti na vstupu a zpětné vazbě uživatele.
Rozdíl B/W Quadcopter vs Drone
Rozdíl mezi kvadrokoptérou a dronem zahrnuje následující.
|
Kvadrokoptéra |
Trubec |
| Kvadrokoptéra je dron, který se vyznačuje návrhem rotoru. | Dron je obecný termín pro jakékoli UAV nebo bezpilotní letecké vozidlo. |
| Je navržen se čtyřmi rotory nebo vrtulemi umístěnými na lehkém rámu. | Zahrnuje celou řadu návrhů, jako je fixní křídlo, hybridní VTOL, multirotor atd. |
| Tento dron může svisle vzlétnout a přistát a unášet na místě. Jsou to manévrovanější ve srovnání s drony s pevným křídlem. | Tento dron se může velmi lišit na základě designu. |
| Příklady kvadrokoptéry jsou: DJI Phantom, DJI Mavic, menší hobby drony atd. | Její příklady jsou: Dodávka Dronů, letecká fotografie, zemědělská inspekce atd. |
| Mají čtyři rotory .. | Drony mají různá čísla (nebo) pevná křídla. |
| Kvadrokoptéry jsou obvykle lehčí a menší. | Jsou větší a složitější. |
| Používají se ve videografii, fotografii, rekreačním létání atd. | Drony jsou použitelné v průmyslových, komerčních a vojenských sektorech. |
Výhody a nevýhody
The Výhody kvadrokoptéry zahrnout následující.
- Mají mnoho výhod kvůli svým jedinečným designu a schopnostem
- Kvadrokoptéry mají stabilní výkon.
- Jsou všestranné a snadno použitelné.
- Manévorovatelnosti a dostupnost mají manévrovatelnost.
- Mohou se vznášet a dosáhnout stabilních letů.
The Nevýhody kvadrokoptéry zahrnout následující.
- Má omezenou dobu a rychlost letu.
- Mají složitý design s různými částmi zranitelnými vůči poškození.
- Závisí na elektrických motorech kvůli potřebě konkrétních změn škrticí klapky, zejména pro stabilizaci.
- Jsou méně efektivní ve srovnání s drony s pevným křídlem.
- Ty mohou být ovlivněny povětrnostními podmínkami.
- Bezpečnostní úvahy:
- Kvadrokoptéry se mohou stát nestabilní díky jejich multirotorovému designu, který může potenciálně vést k nehodám nebo nevyzpytatelnému letu.
- Rychlost přenosu dat je velmi pomalá.
Aplikace
The Aplikace kvadrokoptéry zahrnout následující.
- Kvadrokoptéry se používají v různých aplikacích, mezi něž patří překlenutí různých průmyslových odvětví a aktivit.
- Mohou být použity při letecké fotografii, pátrání a záchraně, dohledu, doručování a volnočasových aktivitách, jakož i akrobacie a závodech.
- Mohou být také použity v zemědělství, kontrole infrastruktury, monitorování životního prostředí atd.
- Kvadrokoptéry se používají v průmyslových a komerčních aplikacích, které zahrnují: letecká fotografie, videografie, přesné zemědělství, bezpečnost, dohled, doručovací služby, přesné zemědělství, inspekce infrastruktury, monitorování životního prostředí atd.
- Používají se v aplikacích veřejného sektoru, jako je veřejná bezpečnost, vyhledávání a záchranu, vymáhání práva, řízení katastrof atd.
To je tedy Přehled kvadrokoptéry , jeho funguje a jeho aplikace. Jedná se o všestranné UAV (bezpilotní letecké vozidlo) s různými aplikacemi, jako je videografie, rekreační létání, letecká fotografie atd. Tyto drony hrají klíčovou roli v různých oborech, jako je průzkum, vyhledávání, záchranné operace, mapování atd. Protokolky představují důležitý pokrok v technologii Drone, která nabízí obecní a agilitaci a dostupnost, která je vyvíjela pro širokou škálu aplikací. Zde je pro vás otázka: Co je UAV?