V tomto projektu se naučíme základní specifikace servomotoru a také to, jak obsluhovat servomotor pomocí časovače IC 555 a několika tlačítek.
Autor: Ankit Negi
PROČ SERVO?
Servomotory se používají v různých oblastech. Používají se hlavně jako akční členy v oblastech, kde potřebujeme přesný pohyb k řízení výstupní zátěže.
Nejlepší příklad je RC auto. Uvidíme, že chcete pohyb o 45 stupňů, ne více, ne méně. V takovém případě nemůžete použít jednoduchý stejnosměrný motor, protože při každém zapnutí překročí požadovanou polohu.
A proto k dosažení tohoto úkolu potřebujeme servomotor, který nejen provede přesnou rotaci o 45 stupňů, ale také se plynule zastaví v požadované poloze.

NĚKOLIK TECHNICKÝCH BODŮ, KTERÉ MUSÍTE VĚDĚT:
A) Před nákupem nebo použitím serva musíte vědět, co v něm je a jak funguje. servomotor se skládá ze tří klíčových komponent:
1. Stejnosměrný motor
2. 1 Potenciometr, analogový nebo digitální
3. Řídicí obvod
B) Ze servomotoru vycházejí celkem 3 vodiče:
1. ČERVENÁ: K pozitivní nabídce
2. ČERNÁ: DO záporné hodnoty nabídky
3. ORANŽOVÁ NEBO ŽLUTÁ: Připojeno k referenčnímu napětí, tj. Zdroji pwm
C) Servomotor se může otáčet o 90 stupňů v obou směrech a pokrývat maximálně 180 stupňů, tj. Buď 90 stupňů ve směru hodinových ručiček nebo 90 stupňů proti směru hodinových ručiček z neutrální polohy.
Chcete-li otáčet motorem ve směru hodinových ručiček, musí být časový interval hodinového impulsu delší než 1,5 milisekundy a jeho otáčení proti směru hodinových ručiček musí být kratší než 1,25 milisekundy, ale frekvence by měla být mezi 50 až 60 Hz.
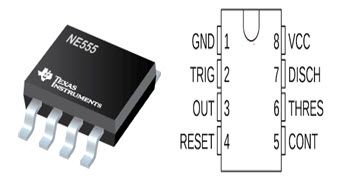
A tak použijeme časovač 555 k vygenerování takových hodinových pulzů pro nás.
KOMPONENTY POŽADOVANÉ PRO TENTO PROJEKT:
1. SERVO MOTOR
dva. 555 ČASOVAČ
3. 6voltová baterie
4. DVA TLAČÍTKA
5. ODPORY: 1K, 4,7K, 33K, 10K, 68K, všechny 1/4 watt 5%
6. JEDEN TRANSISTOR (BC547)
7. DVA KAPACITORY o 0,1uf
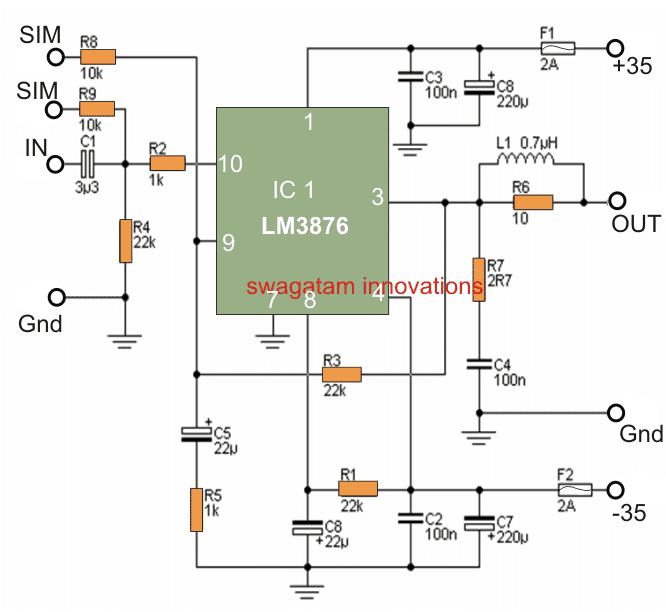
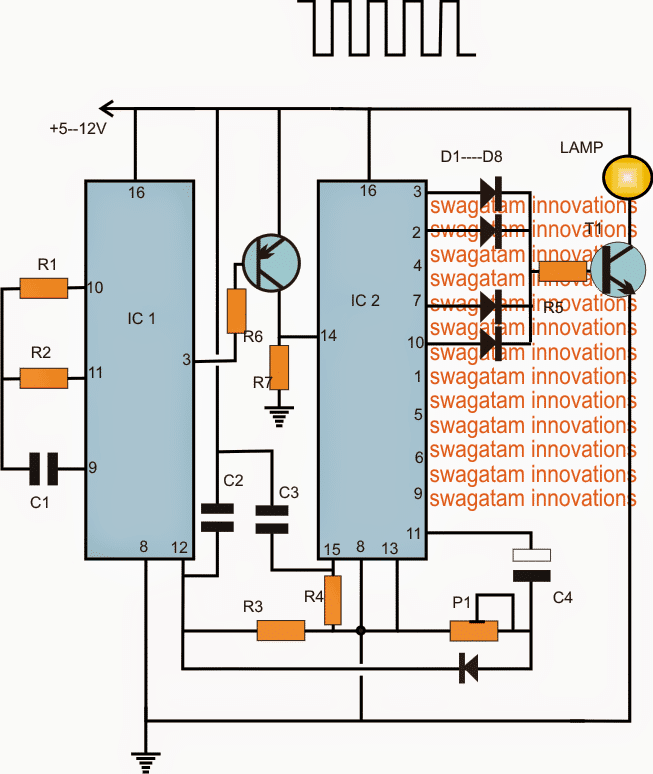
SCHÉMA OBVODU ZOBRAZUJÍCÍ SPUŠTĚNÍ SERVO MOTORU S POUŽITÍM IC 555:

Proveďte připojení podle výše uvedeného schématu zapojení.
Připojte kladný a záporný kolík motoru ke kladnému a zápornému pólu baterie. Připojte signální nebo referenční kolík ke svorce kolektoru tranzistoru.
PRACOVNÍ OBVOD:
1. Když je stisknuto tlačítko vpřed -
Když nastane tento případ, připojí se mezi výboj a prahový kolík rezistor 68 K. Nyní zpočátku není kondenzátor nabitý, takže pin 2 je na 0 V, což je méně než 1 na 3 aplikovaného napětí.
Toto resetuje klopný obvod uvnitř 555 a dává logiku 1 na výstupní svorce, ke které je připojena základna tranzistoru.
To způsobí, že se tranzistor zapne a vede proud přímo k zemi, díky čemuž signální kolík motoru získá nulové napětí, protože tento kolík je přímo připojen ke svorce kolektoru.
Vzhledem k tomu, že se kondenzátor začne nabíjet, když je výstup 1, výstup se stane 0, jakmile se napětí na kondenzátoru zvýší o 2 až 3 aplikovaného napětí, protože je přímo připojen k prahovému kolíku.
Nyní bude tranzistor vypnutý a signální kolík získá logiku 1.
Takto jsou generovány pwm signály na referenčním kolíku motoru. Nyní je v tomto případě doba generovaného impulzu větší než 1,5 milisekundy, kterou můžete vypočítat podle vzorce pracovního cyklu pro 555. A tak získáme 90 stupňů otáčení motoru ve směru hodinových ručiček, jak je vysvětleno v předchozím odstavci.
1. Když je stisknuto tlačítko zpět -
Když nastane tento případ, připojí se mezi výboj a prahový kolík odpor 10 K, což je odpor menší než 68 kOhm. V tomto případě je tedy doba zapnutí pulzu lekce menší než 1,5 milisekundy, kterou můžete vypočítat podle vzorce pracovního cyklu pro 555.
Nyní je pwm generován na referenčním kolíku motoru stejným způsobem jako ve výše uvedeném případě. A tak získáme 90 stupňů otáčení motoru proti směru hodinových ručiček, jak je vysvětleno v předchozím odstavci.
** v obou případech je frekvence mezi 40 a 60 hertzi
Předchozí: 2,4 GHz 10kanálový přepínač dálkového ovládání Další: Kompaktní 3fázový IGBT ovladač IC STGIPN3H60 - Datasheet, Pinout