S vývojem technologií, zejména v robotické technologii, převládají v mnoha aplikacích roboti. Některé z nich jsou vysoce rizikového typu a jsou v nebezpečných oblastech. Vojenské a bojové aplikace nyní rozšiřují své využití robotů v některých zásadních a komplikovaných úkolech. V jednom ze svých článků jsem popsal použití robotů jako špiona ve vojenských operacích. A teď, co když je potřeba obrany robotické vozidlo nebo útok robota? To je místo, kde přichází potřeba robota s útočným mechanismem. Jedním z takových příkladů je robotické vozidlo s laserovou zbraní.

RF řízené robotické vozidlo s uspořádáním laserového paprsku
Takový robot se používá v zásadě ve vojenských operacích a také dopravní policie k detekci rychlosti jedoucích vozidel.
Než se podíváme na podrobnosti o robotech s laserovými zbraněmi, pojďme rychle pochopit LASER jako zbraň.
LASER (zesílení světla stimulační emisí) je jednosměrné silně zaostřené světlo na rozdíl od světla z jednoduché žárovky. Skládá se ze synchronizovaných žlabů a hřebenů, tj. Vlny se navzájem neinterferují. Toto produkuje silně zaostřené světlo o velmi vysoké energii řádově 1000 až 1 milionkrát větší než typické světlo žárovky. Jedná se o zařízení, které řídí emise a absorpci fotonů čerpáním dostatečného množství energie. V tomto je zdroj fotonů zesílen na paprsek světla. Vlnová délka těchto laserů se mění v různých spektrech, jako je viditelné, infračervené a ultrafialové.
Princip LASERU se točí kolem tří věcí, kterými jsou absorpce, spontánní emise a stimulovaná emise. Přiměřené množství energie z fotonu interaguje s atomem, což způsobí, že atom skočí ze stavu s nízkou energií do stavu s vyšší energií. Tento atom spadá zpět do stavu s nižší energií emitováním fotonu zvaného spontánní emise. Ve stimulované emisi je uvolňování energie z atomu umělými prostředky. foton interaguje s excitovaným atomem, má stejnou energii a polarizaci jako dopadající foton.
Nyní se podívejme na hardwarové části robota
- Základna: Základem takového robota může být jakékoli kubické těleso s kolečky připevněnými pro jeho pohyb.
- Stejnosměrný motor: Robot se skládá ze dvou stejnosměrných motorů poháněných ovladači motoru a zajišťuje robotovi požadovaný pohyb.
- Řídící jednotka: Pohyb robota je řízen pomocí RF komunikačního modulu. Vysílač se skládá z tlačítek, mikrokontrolérů, dekodéru a vysokofrekvenčního vysílače, zatímco přijímací jednotka zabudovaná v robotu se skládá z kodéru a modulu RF přijímače pro ovládání robotický pohyb .
- LASEROVÁ zbraň: Na robota je namontována laserová pistole, která plní hlavní úkol robota.
Nahlédnutí do práce robota
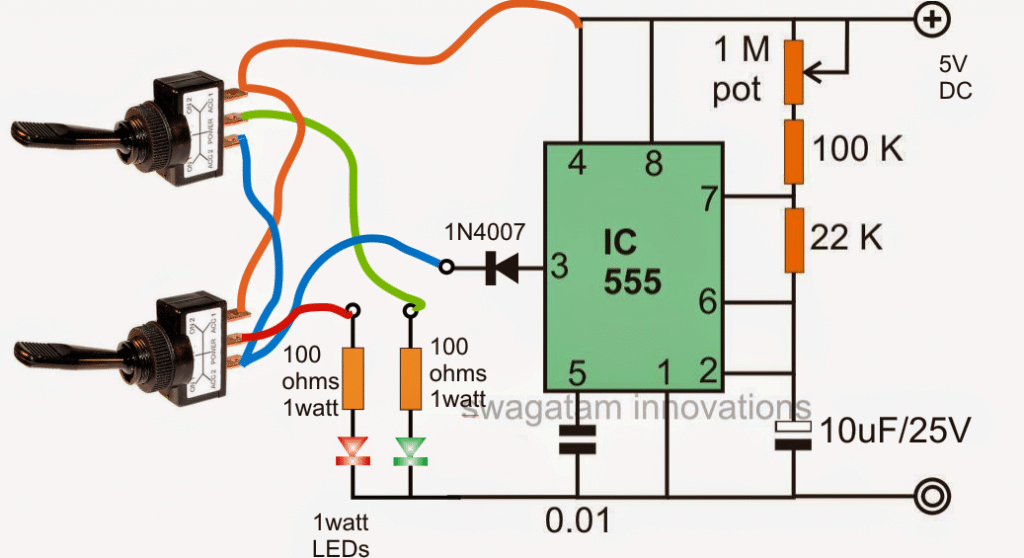
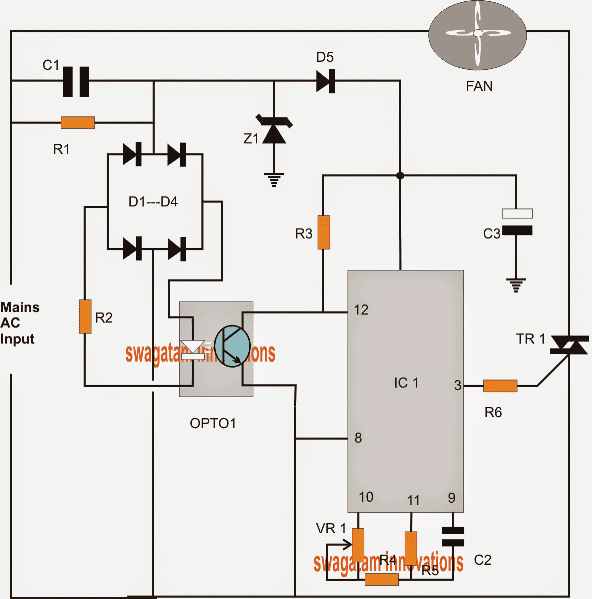
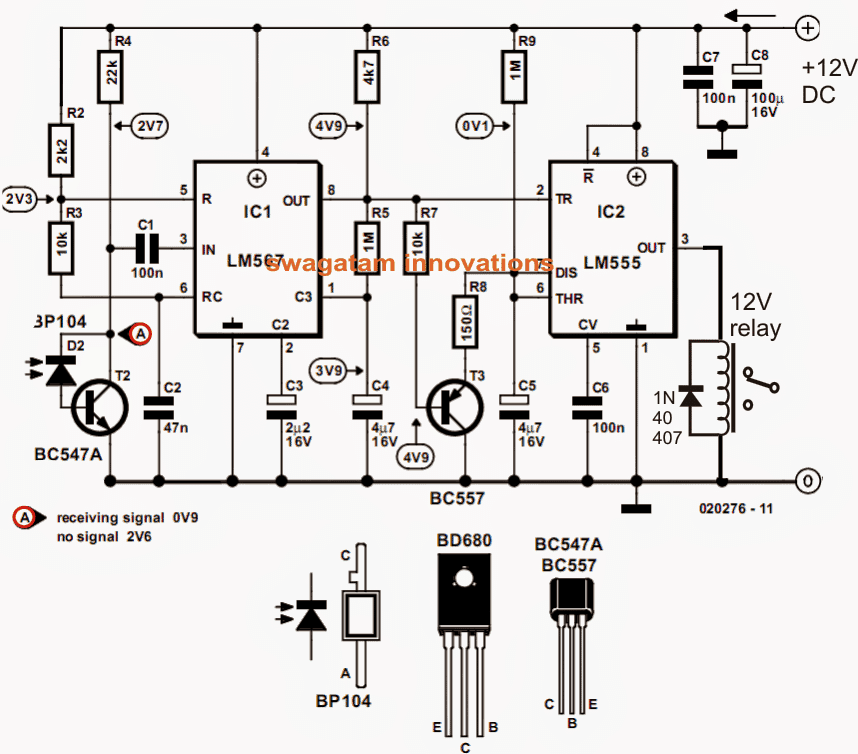
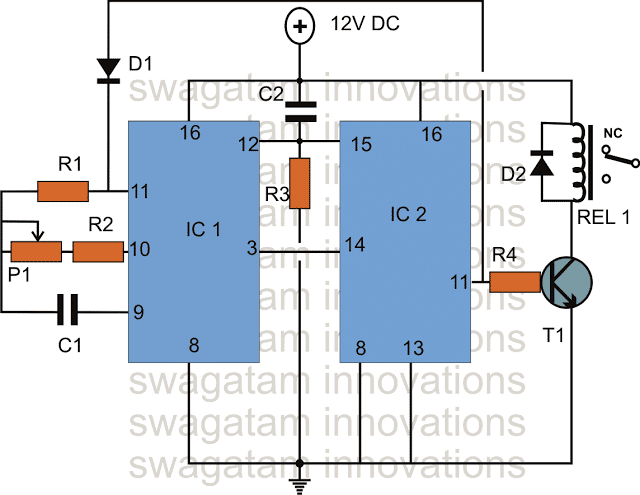
Robot při pohybu v požadovaném směru vystřelí ze světelného paprsku LASER silný paprsek světla, který může buď poškodit cíl, nebo jen vytvořit místo k detekci cíle. LASER musí být poháněn některými zdroji energie. V jednoduchém prototypovém provedení používajícím základní laserové pero je zařízení poháněno tranzistorem fungujícím jako spínač. Tranzistor přijímá nízký logický signál z mikrokontroléru a je ve vypnutém stavu, díky čemuž je modul LASER přímo připojen k 5 V napájecímu zdroji.

Laserová pistole poháněná tranzistorem pracujícím jako invertor
Ovládání robota
K řízení pohybu robota je třeba řídit činnost motorů. Toho lze dosáhnout pomocí RF řízeného provozu ovladačů motoru. Příkazy jsou přenášeny pomocí RF vysílače v určité jednotce vzdálenosti asi 200 metrů a přijímány RF přijímačem k pohonu motorů.
Vysílací jednotka se skládá z několika tlačítek, která fungují jako příkazové spínače pro pohyb robota v libovolném požadovaném směru. Tlačítka jsou propojena s mikrokontrolérem, který je naprogramován tak, aby odesílal data do kódovače v paralelní formě na základě vstupu tlačítka. Kodér převádí tato paralelní data do sériové podoby a tato sériová data jsou přenášena pomocí modulu RF vysílače přes anténu.

Blokové schéma ukazující sekci vysílače
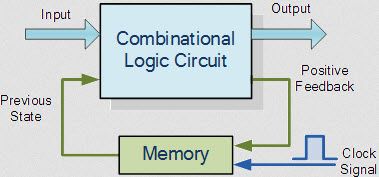
Přijímací jednotka se skládá z modulu RF přijímače, který přijímá modulovaný signál a demoduluje jej. Dekodér přijímá demodulovaný signál v sériové podobě a převádí jej do paralelní formy. Mikrokontrolér přijímá signály a podle toho řídí ovladač motoru. Ovladač motoru použitý v LM293D, který může ovládat 2 motory najednou.

Blokové schéma ukazující sekci přijímače
Pomocí RF komunikace tedy můžeme robota ovládat.
Ve výše uvedených popisech jsem dal krátkou představu o jednoduchém prototypu robotického vozidla s LASEROVÝM paprskem. V reálných aplikacích se k ovládání robota ze vzdálených míst používají běžně komunikační systémy s dlouhým dosahem, jako jsou GSM nebo DTMF.
3 aplikace robotického vozidla s laserovou pistolí:
- Detekce cíle : Robotické vozidlo může pomocí LASEROVÉHO paprsku způsobit bod na cíli, takže je snadno viditelný a lze na něj zaměřit. Příkladem je Air Borne LASER.
- Cíl ničení : Silný Laserový paprsek řádově 95GHz frekvence může způsobit pocit pálení v lidském těle, protože proniká pokožkou o 1/64thpalce a energie paprsku může ohřívat molekuly vody v těle. Příkladem je systém aktivního odmítnutí vyvinutý USA.
- Vyhledávač cílového rozsahu a detekce rychlosti : LASEROVÝ paprsek z robotického vozidla lze použít k nalezení dosahu cíle na principu odrazu LASEROVÉHO světla a také lze vypočítat rychlost cíle, jakmile dostaneme dosah.
Takže teď máme krátkou představu o tom, že Roboti použili detektor cílů a ničitele. Má pro běžnou veřejnost jiné využití než jen pro armádu? Přemýšlejte a odpovězte.