V moderním světě robot bude hrát důležitou roli . Hlavním účelem robota je snížit sílu člověka. Roboti se používají v elektronice v mnoha aplikacích. V tomto článku jsme diskutovali o tom, jak postavit robota s modulem Arduino a mikrokontrolérem 8051. Chcete-li postavit robota pomocí Arduina, vysvětlujeme robot Arduino s vyhýbáním se překážkám. Mezi požadované komponenty patří tělo robota, stejnosměrný motor, ultrazvukový senzor, modul Arduino, IC ovladače motoru a modul Arduino
Jak postavit robota?
The požadované součásti k sestavení robota zahrnuje následující
Tělo robota
Základní tělo robota robot vyhýbání se překážkám je zobrazen na následujícím obrázku. Tělo robota je plastové tělo a na obou stranách obsahuje kola. Před tělem robota je umístěn ultrazvukový senzor. Pomocí ultrazvukového senzoru může překážka detekovat. Je-li robot v pohybu, detekuje-li ultrazvukový senzor nějakou překážku, bude se pohybovat stranou a bude pokračovat v pohybu.

Tělo robota
Stejnosměrný motor
The Stejnosměrný motor je elektrický motor a běží na elektřinu stejnosměrného proudu. Provoz jakéhokoli elektrického motoru je založen na elektromagnetismu. Magnetické pole je vytvářeno vodičem přenášejícím proud, když je umístěno ve vnějším magnetickém poli, zažije sílu úměrnou proudu ve vodiči. Obecně víme, že magnety jsou přitahovány opačnou polaritou ze severu na jih a pokud polarity jsou stejné jako sever na sever a jih na jih, pak budou magnety odpuzovat.

Stejnosměrný motor
Vnitřní konfigurace stejnosměrného motoru je navržena k připojení magnetické interakce mezi vodičem vedoucím proud a vnějším magnetickým polem k vytvoření pohybu. V tomto používáme dva stejnosměrné motory, každý motor obsahuje 6v a celkem dva stejnosměrné motory obsahují 12v. Dva stejnosměrné motory jsou umístěny v těle robota, což můžeme pozorovat na následujícím obrázku. Tělo robota se pohybuje pomocí stejnosměrných motorů

Tělo robota se stejnosměrným motorem
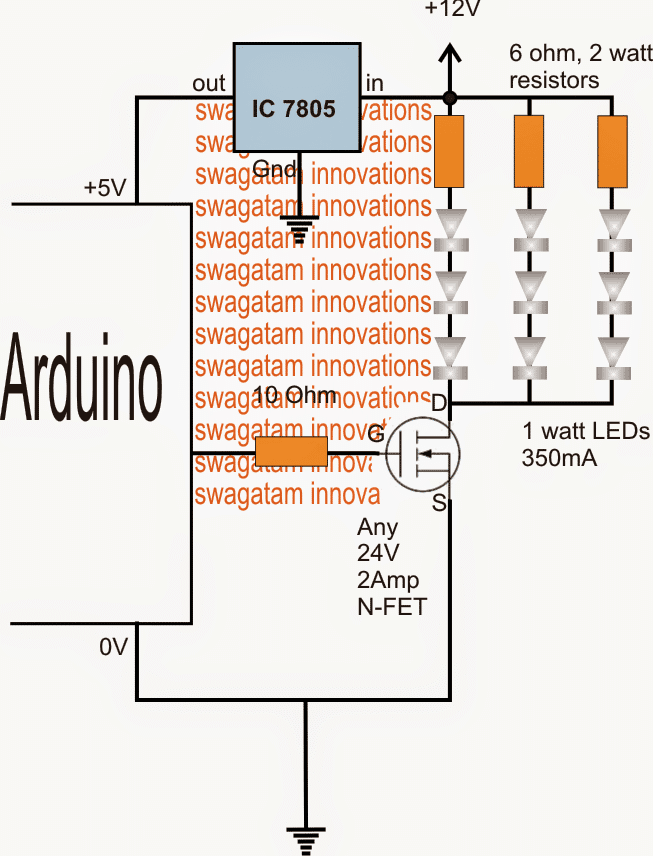
Arduino modul
Následující obrázek ukazuje obrázek modulu arduino. The modul Arduino hraje důležitou roli při konstrukci robota pro vyhýbání se překážkám pomocí sady arduino. Kolík přijímače arduina je připojen k druhému kolíku ultrazvukového snímače a 1., 2. a 3. kolík modulu arduino je připojen k ovladači stejnosměrného motoru. Kondenzátor a dioda běžných komponentů jsou také připojeny k modulu arduino pomocí napájení z baterie.

Arduino modul
IC řidiče motoru
Spuštění stejnosměrného motoru IC ovladače motoru použitý. Kolíky 3,6 a 11, 14 budiče motoru jsou připojeny k stejnosměrnému motoru. Vstupní kolíky 1 a 2 jsou připojeny k modulu arduino a aktivační kolík je připojen k kolíku vysílače arduina. Kolíky 4, 5, 12, 13 ovladače motoru jsou připojeny k zemi.

IC řidiče motoru
Ultrazvukový senzor
V tomto pojetí ultrazvukový senzor slouží k detekci překážky před námi a odešle povel na desku arduino. V závislosti na vstupním signálu mikrokontrolér přesměrovává robota na pohyb v různých směrech.

Ultrazvukový senzor
Aplikace vyhýbání se překážkám robotů arduino
- Robot Arduino se může pohybovat na jakémkoli povrchu
- Může se pohybovat na kovovém povrchu, jako je tělo chladničky.
Na následujícím obrázku je robot arduino, který se vyhýbá překážkám

Arduino robot pro zabránění překážkám
Postavit robota s mikrokontrolér 8051 vysvětlujeme robotické vozidlo s detektorem kovů. Součásti potřebné k výrobě robota s mikrokontrolérem 8051 jsou
- 8051 mikrokontrolér
- Stejnosměrné motory
- Řidiči motorů
- Detektor kovů
- Dekodér
- Kodér
- Tlačítka
- Krystal
- RF vysílač a přijímač
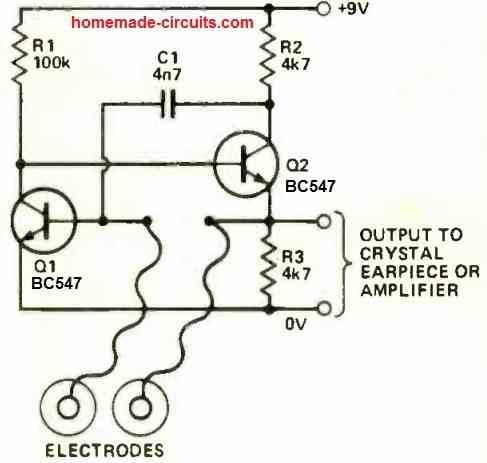
Detektor kovů
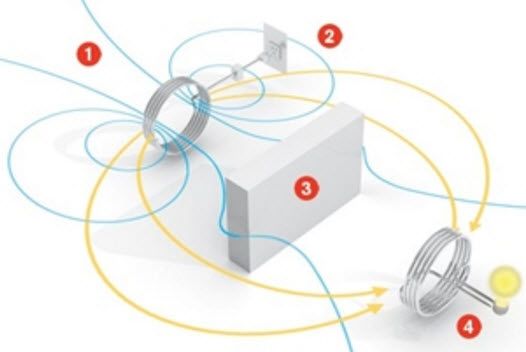
The detektor kovů je cívka, která má jednu nebo více kovových cívek používaných k detekci kovů na zemi. Detektor kovů pracuje na principu elektromagnetické indukce. Detektor kovů je připojen k tělu robota přes PCB, což můžeme pozorovat na posledním obrázku. Následující obrázek ukazuje obecný detektor kovů používaný v elektronických projektech.

Detektor kovů
Tlačítka
Tlačítka jsou tlačítka, která jsou vyrobena z tvrdých kovů, jako je plast a kov. Obecně se tlačítka používají k resetování programu v mikrokontroléru. Následující obrázek ukazuje obrázek tlačítka.

Stiskněte tlačítko
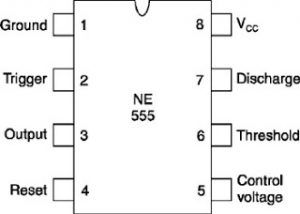
Mikrokontrolér 8051
The Mikrokontrolér 8051 se skládá ze 40 pinů . 4. a 5. pin mikrokontroléru je připojen k krystalovému oscilátoru. Kolík Vcc je napájen 5 V a zemnící kolík je připojen k zemi. Kolíky 15, 16, 18, 19 mikrokontroléru jsou připojeny k IC kodéru HT12E. Kolíky 2, 7, 8, 9 mikrokontroléru jsou připojeny k tlačítkům.
Následující obrázek po připojení všech komponent, jako je rezistor, kondenzátor, krystalový oscilátor, mikrokontrolér řady 8051, kodéry atd., Je zapnutý desku plošných spojů .

Připojení PCB
Níže uvedený obrázek ukazuje robota detektoru kovů s mikrokontrolérem řady 8051.

Robot s detektorem kovů s mikrokontrolérem řady 8051
V tomto článku jsme diskutovali o Jak postavit robota pomocí mikrokontroléru arduino a 8051 . Doufám, že čtením tohoto článku jste získali některé základní znalosti pro sestavení robota. Máte-li dotazy k tomuto článku nebo k elektronice a komunikační projekty , neváhejte a komentujte v níže uvedené části. Tady je otázka pro vás, Co je to mikrokontrolér řady 8051?
.