V tomto příspěvku diskutujeme o vytvoření jednoduchého obvodu regulátoru otáček 3fázového indukčního motoru, který lze také použít pro jednofázový indukční motor nebo doslova pro jakýkoli typ střídavého motoru.
Pokud jde o řízení rychlosti indukčních motorů , obvykle se používají převodníky matic, které zahrnují mnoho složitých stupňů, jako jsou LC filtry, obousměrná pole přepínačů (pomocí IGBT) atd.
To vše se používá pro konečné dosažení useknutého střídavého signálu, jehož pracovní cyklus lze upravit pomocí složitého obvodu mikrokontroléru, čímž se nakonec zajistí požadovaná regulace otáček motoru.
Můžeme však experimentovat a pokusit se dosáhnout třífázového řízení rychlosti indukčního motoru prostřednictvím mnohem jednodušší koncepce s využitím pokročilých integrovaných obvodů optického vazebního členu detektoru nulového přechodu, výkonového triaku a obvodu PWM.
Použití optočlenu detektoru překročení nuly
Díky řadě optočlenů MOC, díky nimž jsou triakové řídicí obvody extrémně bezpečné a snadno konfigurovatelné a umožňují bezproblémovou integraci PWM pro zamýšlené ovládací prvky.
V jednom ze svých dřívějších příspěvků jsem diskutoval o jednoduchém Obvod řízení motoru motoru s pozvolným rozběhem PWM který implementoval IC MOC3063 pro zajištění účinného pozvolného rozběhu připojeného motoru.
I zde používáme identickou metodu pro vynucování navrhovaného obvodu regulátoru otáček 3fázového indukčního motoru, následující obrázek ukazuje, jak toho lze dosáhnout:
Na obrázku vidíme tři identické stupně MOC opto vazebního členu konfigurované v jejich standardním režimu triakového regulátoru a vstupní strana integrovaná s jednoduchý obvod IC 555 PWM .
3 obvody MOC jsou konfigurovány pro manipulaci s 3fázovým střídavým vstupem a jejich dodávání do připojeného indukčního motoru.
Vstup PWM na izolované straně ovládání LED opto určuje poměr sekání třífázového střídavého vstupu, který je zpracováván MOC ICS.
Použití řadiče IC 555 PWM (přepínání nulového napětí)
Z toho vyplývá, že úpravou PWM pot spojený s 555 IC lze účinně řídit rychlost indukčního motoru.
Výstup na svém pinu č. 3 přichází s měnícím se pracovním cyklem, který následně odpovídajícím způsobem přepíná výstupní triaky, což má za následek buď zvýšení hodnoty AC RMS, nebo její snížení.
Zvýšení RMS prostřednictvím širších PWM umožňuje získání vyšší rychlosti na motoru, zatímco snížení AC RMS prostřednictvím užších PWM vytváří opačný účinek, to znamená, že způsobí proporcionální zpomalení motoru.
Výše uvedené funkce jsou implementovány s velkou přesností a bezpečností, protože integrovaným obvodům je přiřazeno mnoho interních sofistikovaných funkcí, speciálně určených pro hnací triaky a těžké indukční zátěže jako jsou indukční motory, solenoidy, ventily, stykače, polovodičová relé atd.
Integrovaný obvod také zajišťuje dokonale izolovaný provoz pro stejnosměrný stupeň, který uživateli umožňuje provádět úpravy bez obav z úrazu elektrickým proudem.
Tento princip lze také efektivně využít k řízení otáček jednofázového motoru tím, že místo 3 použije jeden MOC IC.
Návrh je ve skutečnosti založen na časově proporcionální triakový pohon teorie. Horní obvod IC555 PWM může být upraven tak, aby produkoval 50% pracovní cyklus při mnohem vyšší frekvenci, zatímco dolní obvod PWM může být použit pro implementaci operace řízení otáček indukčního motoru prostřednictvím úprav přidruženého hrnce.
Doporučuje se, aby tato 555 IC měla relativně nižší frekvenci než horní obvod IC 555. Toho lze dosáhnout zvýšením kondenzátoru pin # 6/2 na přibližně 100 nF.

POZNÁMKA: PŘIDÁNÍ VHODNÝCH INDUKTORŮ V SÉRII S FÁZOVÝMI DRÁTY MŮŽE DRASTICKY ZLEPŠIT VÝKON ŘÍZENÍ RYCHLOSTI SYSTÉMU.
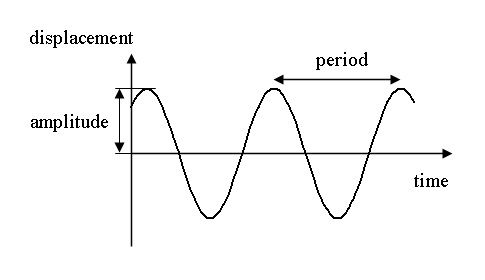
Předpokládaný průběh a fázové řízení pomocí výše uvedeného konceptu:

Výše vysvětlený způsob ovládání 3fázového indukčního motoru je ve skutečnosti docela hrubý, protože má žádná regulace V / Hz .
Jednoduše využívá zapnutí / vypnutí sítě různými rychlostmi, aby produkoval průměrný výkon motoru a řídil rychlost změnou tohoto průměrného střídavého proudu do motoru.
Představte si, že ručně zapnete / vypnete motor 40krát nebo 50krát za minutu. To by vedlo k tomu, že váš motor zpomalí na určitou relativní průměrnou hodnotu, přesto se bude pohybovat nepřetržitě. Výše uvedený princip funguje stejným způsobem.
Techničtější přístup je navrhnout obvod, který zajistí správnou kontrolu poměru V / Hz a automaticky jej upraví v závislosti na rychlosti skluzu nebo kolísání napětí.
K tomu v zásadě využíváme následující fáze:
- Okruh ovladače H-Bridge nebo Full Bridge IGBT
- Stupeň 3fázového generátoru pro napájení celého mostního obvodu
- Procesor V / Hz PWM
Použití řídicího obvodu IGBT s plným mostem
Pokud vám nastavovací postupy výše uvedeného triakového designu připadají skličující, můžete vyzkoušet následující řízení rychlosti indukčního motoru založené na PWM:

Obvod zobrazený na výše uvedeném obrázku využívá ovladač jednoho můstku s plným můstkem IC IRS2330 (nejnovější verze je 6EDL04I06NT), která má všechny vestavěné funkce pro zajištění bezpečného a dokonalého třífázového provozu motoru.
IC potřebuje pouze synchronizovaný 3fázový logický vstup přes své HIN / LIN pinouty pro generování požadovaného 3fázového oscilačního výstupu, který se nakonec použije pro provoz IGBT sítě s plným můstkem a připojeného 3fázového motoru.
The ovládání rychlosti vstřikování PWM je implementován prostřednictvím 3 samostatných polovičních můstků NPN / PNP ovladačů, řízených napájením SPWM z generátoru IC 555 PWM, jak je vidět v našich předchozích návrzích. Tato úroveň PWM může být nakonec použita pro řízení rychlosti indukčního motoru.
Než se naučíme skutečnou metodu řízení rychlosti pro indukční motor, nejprve pochopíme, jak automaticky Řízení V / Hz lze dosáhnout pomocí několika obvodů IC 555, jak je popsáno níže
Automatický obvod procesoru PWM V / Hz (uzavřená smyčka)
Ve výše uvedených částech jsme se naučili návrhy, které pomohou indukčnímu motoru pohybovat se rychlostí stanovenou výrobcem, ale nebude se upravovat podle konstantního poměru V / Hz, pokud nebude integrován následující procesor PWM s H -Most PWM vstupní posuv.

Výše uvedený obvod je jednoduchý PWM generátor využívající pár IC 555 . IC1 generuje frekvenci PWM, která se pomocí R4 / C3 převádí na trojúhelníkové vlny na pinu č. 6 IC2.
Tyto trojúhelníkové vlny jsou porovnány se sinusovými vlnami na pinu č. 5 IC2. Tyto zvlnění vzorku se získají usměrněním třífázové střídavé sítě do zvlnění 12V střídavého proudu a jsou přiváděny na pin # 5 IC2 pro požadované zpracování.
Porovnáním těchto dvou křivek je vhodně dimenzováno SPWM je generován na pinu č. 3 IC2, který se stává hnacím PWM pro síť H-bridge.
Jak funguje obvod V / Hz
Když je napájení zapnuto, kondenzátor na pinu # 5 začíná vykreslením nulového napětí na pinu # 5, které způsobí nejnižší hodnotu SPWM Obvod H-můstku , což zase umožňuje spouštění indukčního motoru s pomalým pozvolným pozvolným rozběhem.
Jak se tento kondenzátor nabíjí, potenciál na pinu # 5 stoupá, což úměrně zvyšuje SPWM a umožňuje motoru postupně zvyšovat rychlost.
Můžeme také vidět obvod zpětné vazby otáčkoměru, který je také integrován s kolíkem č. 5 IC2.
Tento tachometr sleduje rychlost rotoru nebo rychlost prokluzu a generuje další napětí na pinu č. 5 IC2.
Nyní, když se zvyšuje rychlost motoru, se rychlost prokluzu pokusí synchronizovat s frekvencí statoru a v procesu začne získávat rychlost.
Toto zvýšení indukčního skluzu úměrně zvyšuje napětí tachometru, což zase způsobí zvýšení IC2 SPWM výstup a to zase dále zvyšuje otáčky motoru.
Výše uvedená úprava se snaží udržovat poměr V / Hz na poměrně konstantní úrovni, dokud se SPWM z IC2 nedokáže dále zvýšit.
V tomto okamžiku dosáhnou rychlost prokluzu a rychlost statoru ustáleného stavu, který je udržován, dokud se nezmění vstupní napětí nebo rychlost prokluzu (v důsledku zatížení). V případě, že dojde ke změně, začne znovu fungovat obvod procesoru V / Hz a začne upravovat poměr pro udržení optimální odezvy rychlosti indukčního motoru.
Otáčkoměr
The Obvod tachometru lze také levně postavit pomocí následujícího jednoduchého obvodu a integrovat s výše vysvětlenými fázemi obvodu:

Jak implementovat řízení rychlosti
Ve výše uvedených odstavcích jsme porozuměli procesu automatické regulace, kterého lze dosáhnout integrací a zpětná vazba otáčkoměru do automatického regulačního obvodu SPWM.
Nyní se naučíme, jak lze řídit rychlost indukčního motoru změnou frekvence, což nakonec donutí SPWM klesat a udržovat správný poměr V / Hz.
Následující diagram vysvětluje fázi regulace rychlosti:

Zde můžeme vidět třífázový generátorový obvod využívající IC 4035, jehož frekvence fázového posunu se může měnit změnou vstupu hodin na jeho pinu # 6.
3fázové signály jsou aplikovány přes brány 4049 IC pro výrobu požadovaných kanálů HIN, LIN pro síť řidičů s plným mostem.
To znamená, že vhodnou změnou taktovací frekvence IC 4035 můžeme účinně změnit pracovní 3fázovou frekvenci indukčního motoru.
To je implementováno prostřednictvím jednoduchého astabilního obvodu IC 555, který napájí nastavitelnou frekvenci na pinu č. 6 IC 4035 a umožňuje nastavení frekvence prostřednictvím připojeného 100K potu. Kondenzátor C je třeba vypočítat tak, aby rozsah nastavitelného kmitočtu spadal do správné specifikace připojeného indukčního motoru.
Když se frekvenční měnič mění, mění se také efektivní frekvence indukčního motoru, což odpovídajícím způsobem mění rychlost motoru.
Například když je frekvence snížena, způsobí to snížení rychlosti motoru, což zase způsobí, že výstup tachometru proporcionálně sníží napětí.
Toto proporcionální snížení výkonu tachometru nutí SPWM zúžit a tím úměrně stahuje výstup napětí k motoru.
Tato akce zase zajišťuje udržení poměru V / Hz při řízení rychlosti indukčního motoru prostřednictvím řízení frekvence.
Varování: Výše uvedený koncept je založen pouze na teoretických předpokladech, postupujte prosím opatrně.
Máte-li jakékoli další pochybnosti týkající se tohoto návrhu 3fázového regulátoru otáček indukčního motoru, můžete tento komentář zveřejnit prostřednictvím svých komentářů.
Předchozí: Jak navrhnout obvod nepřerušitelného napájení (UPS) Další: Zapnutí / vypnutí dvou alternativních zatížení pomocí IC 555

![4 jednoduché obvody spínače klapek [testováno]](https://electronics.jf-parede.pt/img/4017-ic-circuits/21/4-simple-clap-switch-circuits.png)