Úvod
Jednofázové indukční motory se hojně používají v zařízeních a průmyslových zařízeních. Jednofázový indukční motor s permanentním děleným kondenzátorem (PSC) je nejjednodušší a nejpoužívanější motor tohoto typu.
Motory PSC jsou konstrukčně jednosměrné, což znamená, že jsou určeny k otáčení v jednom směru. Přidáním přídavných vinutí a externích relé a spínačů nebo použitím převodových mechanismů lze změnit směr otáčení. V této myšlence budeme podrobně diskutovat o tom, jak řídit rychlost motoru PSC v obou směrech pomocí mikrokontroléru PIC16F72 a výkonové elektroniky.
Mikrokontrolér PIC16F72 byl vybrán, protože je jedním z nejjednodušších a levných univerzálních mikrokontrolérů, které má Microchip ve svém portfoliu. I když nemá PWM v hardwaru k řízení doplňkových PWM výstupů s vloženým mrtvým pásmem, všechny PWM jsou generovány ve firmwaru pomocí časovačů a výstupu na univerzální výstupní piny.
Co je frekvenční měnič?
Pohon s proměnnou frekvencí nebo VFD je způsob, který umožňuje řízení rychlosti indukčního motoru aplikací proměnné frekvence napájecího napětí AC. Ovládáním výstupní střídavé frekvence je možné řídit motor různými rychlostmi na základě požadavků. Jedná se o pohon s nastavitelnou rychlostí, který se z velké části používá v průmyslových aplikacích, jako jsou čerpadla, ventilační systémy, výtahy, pohony obráběcích strojů atd. Je to v zásadě energeticky úsporný systém. Prvním požadavkem je proto generování sinusové vlny s různými frekvencemi pro VFD.
Jaká je technologie přijatá ve VFD?
Jedná se o systém, který poskytuje střídavý výstup s různou frekvencí pro řízení rychlosti motoru podle potřeb. Jednofázové střídače s proměnnou frekvencí jsou běžnější, protože většina zařízení pracuje v jednofázovém střídavém napájení. Skládá se z plně vlnového můstkového usměrňovače pro převod střídavého proudu 230/110 V na přibližně 300/150 V DC. Výstup stejnosměrného proudu z můstkového usměrňovače je vyhlazován vysoce hodnotným vyhlazovacím kondenzátorem, aby se odstranily zvlnění střídavého proudu. Toto pevné stejnosměrné napětí se poté přivádí do obvodu generujícího frekvenci tvořeného tranzistory MOSFET (tranzistor s efektem pole oxidu kovu) / IGBT (izolovaný bipolární tranzistor). Tento obvod MOSFET / IGBT přijímá stejnosměrný proud a převádí jej na střídavý proud s proměnnou frekvencí pro řízení rychlosti zařízení.
Změny frekvence lze dosáhnout pomocí elektronických obvodů nebo mikrokontroléru. Tento obvod mění frekvenci napětí (PWM) aplikovaného na hradlový pohon obvodu MOSFET / IGBT. Na výstupu se tedy objeví střídavé napětí různé frekvence. Mikrokontrolér lze naprogramovat tak, aby podle potřeby měnil frekvenci výstupu.
Systém VFD:
Zařízení s proměnnou frekvencí má tři části, jako je střídavý motor, řídicí jednotka a provozní rozhraní.
Střídavý motor používaný ve VFD je obecně třífázový indukční motor, i když je jednofázový motor se používá v některých systémech. Obecně se používají motory, které jsou určeny pro provoz s pevnými otáčkami, ale některé konstrukce motorů nabízejí lepší výkon ve VFD než standardní provedení.
Součástí ovladače je pevný elektronický obvod měniče výkonu pro převod střídavého proudu na stejnosměrný proud a poté na střídavý kvazi-sinusový průběh. První částí je sekce měniče AC na DC, která má můstek usměrňovače plné vlny, obvykle třífázový / jednofázový můstek plné vlny. Tento mezilehlý stejnosměrný proud se poté pomocí spínacího obvodu měniče převádí na kvazinezínovou vlnu AC. Zde se tranzistory MOSFET / IGBT používají pro invertování DC na AC.
Sekce střídače převádí stejnosměrný proud na tři kanály střídavého proudu, aby poháněla třífázový motor. Sekce Controller může být také navržena tak, aby poskytovala vylepšený účiník, menší harmonické zkreslení a nízkou citlivost na vstupní střídavé přechodové jevy.
Ovládání voltů / Hz:
Řídicí obvod reguluje frekvenci dodávaného střídavého proudu do motoru prostřednictvím metody řízení voltů na hertz. Střídavý motor vyžaduje proměnlivé aplikované napětí, když se frekvence mění, aby poskytla stanovený točivý moment. Například pokud je motor navržen tak, aby pracoval při 440 voltech při 50 Hz, musí se střídavý proud přiváděný do motoru snížit na polovinu (220 voltů), když se frekvence změní na polovinu (25 Hz). Tato regulace je založena na voltech / Hz. Ve výše uvedeném případě je poměr 440/50 = 8,8 V / Hz.
 Další metody řízení napětí:
Další metody řízení napětí:
 Další metody řízení napětí:
Další metody řízení napětí:Kromě řízení napětí / Hz, pokročilejší metody, jako je přímé řízení krouticího momentu nebo DTC, Space Vector Pulse Width Modulation (SVPWM) , atd. se také používají k ovládání rychlosti motoru. Regulací napětí v motoru lze přesně řídit magnetický tok a točivý moment. V metodě PWM produkují invertorové spínače kvazi-sinusovou vlnu řadou úzkých pulzů s různou dobou trvání pulsu pseudosinusoidy.
Provozní rozhraní:
Tato část umožňuje uživateli spustit / zastavit motor a upravit rychlost. Mezi další vybavení patří reverzace motoru, přepínání mezi ručním a automatickým řízením otáček atd. Provozní rozhraní se skládá z panelu s displejem nebo indikátorů a měřičů pro zobrazení rychlosti motoru, aplikovaného napětí atd. Sada klávesnicových spínačů je obecně k dispozici pro ovládání systému.
Vestavěný - měkký start:
V běžném indukčním motoru zapnutém pomocí střídavého spínače je odebíraný proud mnohem vyšší než jmenovitá hodnota a může se zvyšovat se zvýšeným zrychlením zátěže, aby se dosáhlo plné rychlosti motoru.
Na druhé straně v motoru řízeném VFD je zpočátku aplikováno nízké napětí při nízké frekvenci. Tato frekvence a napětí se zvyšují řízenou rychlostí, aby se zátěž zrychlila. Tím se vyvine téměř větší točivý moment, než je jmenovitá hodnota motoru.
Komutace motoru VFD :
Frekvence a aplikované napětí se nejprve sníží na řízenou úroveň a poté se snižují, dokud se nestane nulovou a motor se nevypne.
Aplikační obvod pro řízení rychlosti jednofázového indukčního motoru
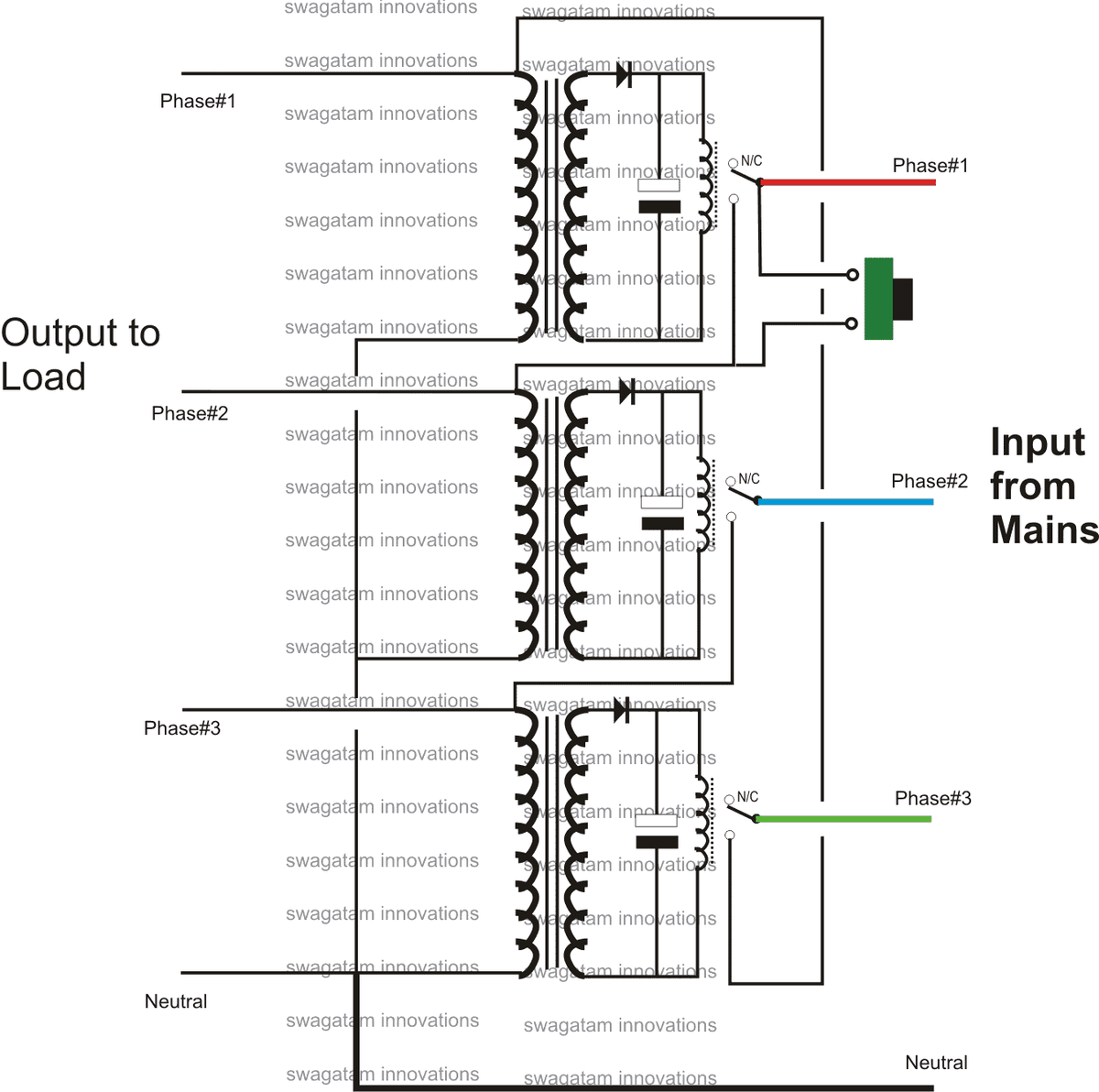
Přístup je relativně snadný, pokud jde o výkonový obvod a řídicí obvod. Na vstupní straně se používají zdvojovače napětí a na výstupní straně se používá H-můstek nebo 2fázový měnič, jak je znázorněno na obrázku 2. Jeden konec hlavního a spouštěcího vinutí je připojen ke každému polovičnímu můstku a ostatní konce jsou připojeny k neutrálnímu bodu zdroje střídavého proudu.
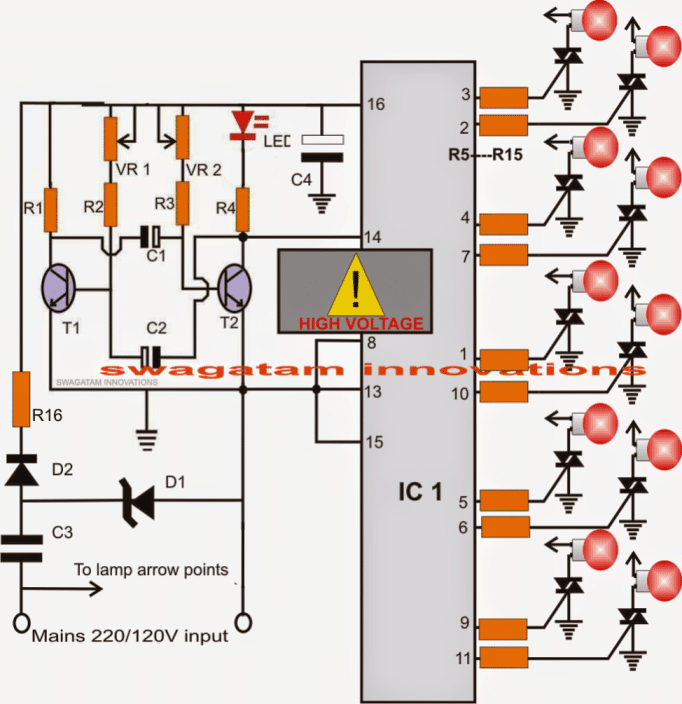
Řídicí obvod vyžaduje čtyři PWM se dvěma komplementárními páry s dostatečným mrtvým pásmem mezi doplňkovými výstupy. Mrtvá pásma PWM jsou PWM0-PWM1 a PWM2-PWM3. PIC16F72 nemá PWM navržené v hardwaru pro výstup tak, jak potřebujeme. Pokud jde o VF, stejnosměrná sběrnice je syntetizována změnou frekvence a amplitudy. To způsobí, že dvě sinusová napětí budou mimo fázi.
Pokud napětí přivedené na hlavní vinutí zpožďuje počáteční vinutí o 90 stupňů, motor běží v jednom (tj. Dopředném) směru. Pokud chceme změnit směr otáčení, pak napětí přivedené na hlavní vinutí vede počáteční vinutí.
Doufám, že máte představu o frekvenčním měniči pro indukční motor z výše uvedeného článku. takže pokud máte nějaké dotazy k tomuto konceptu nebo k elektrickým a elektronický projekt prosím opusťte sekci komentářů níže.