Elektrický stroj, který převádí elektrickou energii na mechanickou energii se nazývá elektrický motor. Nejdůležitějším elektromotorem je jednoduché elektrostatické zařízení vytvořené skotským mnichem Andrewem Gordonem ve 40. letech 17. století. V roce 1821 však Michael Faraday prokázal přeměnu elektrické energie na energii mechanickou.
Elektrické motory jsou primárně rozděleny do dvou kategorií: střídavé motory a Stejnosměrné motory . Každá kategorie je opět rozdělena do mnoha typů. Mnoho spotřebičů, jako je mixér, mlýnek, ventilátor atd., Nejčastěji používaných domácích spotřebičů, ve kterých můžeme najít různé typy motorů a které lze provozovat při různých rychlostech s regulací otáček motorů. V tomto článku budeme diskutovat o jednom z hlavních typů stejnosměrných motorů, jmenovitě Krokový motor a jeho ovládání pomocí mikrokontroléru.
Krokový motor
Synchronní a střídavý stejnosměrný motor který převádí elektrické impulsy na mechanické pohyby, a proto se po každém kroku otáčí s určitým úhlem pro dokončení úplné rotace, se nazývá krokový motor. Úhel mezi kroky otáčení krokového motoru se nazývá úhel kroku motoru.

Krokový motor
Krokové motory jsou podle svého vinutí rozděleny do dvou typů: Unipolární krokové motory a bipolární krokové motory. Unipolární krokový motor se často používá v mnoha aplikacích kvůli jeho snadné obsluze ve srovnání s bipolárním krokovým motorem. Existují však různé typy krokových motorů, jako je krokový motor s permanentním magnetem, krokový motor s proměnnou neochotou a hybridní krokový motor.
Ovládání krokového motoru
Krokový motor lze ovládat různými technikami, ale zde diskutujeme o řízení krokového motoru pomocí Mikrokontrolér Atmega . 89C51 je mikrokontrolér Rodina mikrokontrolérů 8051 .

Blokové schéma řízení krokového motoru
Blokové schéma řízení krokového motoru pomocí mikrokontroléru 8051 je znázorněno na obrázku s zdroj napájení , mikrokontrolér, krokový motor a ovládací spínací bloky.
2 metody pro návrh řídicího obvodu krokového motoru
Řídicí jednotka krokového motoru je navržena pomocí 8051 mikrokontrolérů a spínací obvod pro řízení rychlosti krokového motoru. Obvod ovládacího spínače lze navrhnout pomocí tranzistorové spínače nebo pomocí IC krokového motoru jako je ULN2003 místo tranzistorů.
1. Řídicí obvod pomocí IC řídicí jednotky krokového motoru
Unipolární krokový motor lze otáčet postupným napájením statorových cívek. Pořadí těchto napěťových signálů přiváděných přes motorové cívky nebo vodiče je dostatečné pro pohon motoru, a proto není pro řízení směru proudu ve statorových cívkách vyžadován žádný budicí obvod.

Ovládání krokového motoru pomocí IC
Dvoufázový krokový motor se skládá ze čtyř koncových vodičů připojených k cívkám a dvou společných vodičů připojených ke dvěma koncovým vodičům, které tvoří dvě fáze. Společné body a koncové body dvou fází jsou připojeny k zemi nebo k Vcc a pinům mikrokontroléru. Pro otáčení motoru musí být koncové body dvou fází napájeny. Primárně se na první koncový bod fáze 1 přivádí napětí a na první koncový bod fáze 2 se přivádí další napětí atd.
Krokový motor lze provozovat v různých režimech, jako je krokový režim Wave Drive, krokový režim Full Drive a krokový režim Half Drive.
Režim krokování Wave Drive
Opakováním výše uvedené sekvence lze motor otáčet v režimu krokování vlnového pohonu buď ve směru hodinových ručiček nebo proti směru hodinových ručiček na základě výběru koncových bodů. Tabulka níže ukazuje sled fází signálu pro režim krokování vlnového pohonu.


Režim krokování Wave Drive
Režim krokování na plný pohon
Energií dvou koncových bodů různých fází současně dosáhnete režimu krokování na plný pohon. Tabulka ukazuje sled fází signálu pro režim krokování na plný pohon.


Režim krokování na plný pohon
Režim krokování poloviční jízdy
Kombinace kroků vlnění a režimů krokování s plným pohonem dosahuje režimu krokování s polovičním pohonem. V tomto režimu je tedy krokovací úhel rozdělen na polovinu. Tabulka ukazuje sled fází signálu v režimu krokování polovičního pohonu.


Režim krokování poloviční jízdy
Krokový úhel obecně závisí na rozlišení krokového motoru. Velikost kroků a směr otáčení jsou přímo úměrné počtu a pořadí vstupní sekvence. Rychlost otáčení hřídele závisí na frekvenci vstupní sekvence. Kroutící moment a počet magnetů současně magnetizovaných jsou úměrné.
Krokový motor vyžaduje proud 60 mA, ale maximální jmenovitý proud mikrokontroléru Atmega AT89C51 je 50 mA. Řídicí jednotka krokového motoru IC se tedy používá k propojení krokového motoru s mikrokontrolérem pro přenos signálů.
2. Řídicí obvod spínače pomocí tranzistorů
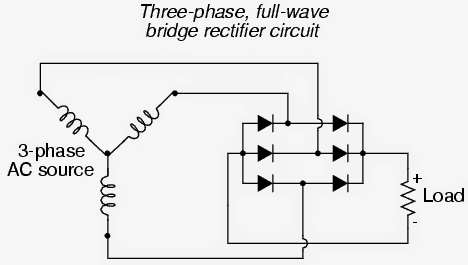
Napájení obvodu lze dodat snížením napětí z 230 V na 7,5 V pomocí sestupného transformátoru a poté usměrnění můstkovým usměrňovačem s diodami . Tento usměrněný výstup se přivádí do filtračního kondenzátoru a poté prochází regulátorem napětí. Regulovaný výstup 5 V se získává z regulátoru napětí. Resetovací pin9 je připojen mezi kondenzátor a rezistor.

Řídicí obvod krokového motoru pomocí tranzistoru
Krokový motor se obecně skládá ze čtyř cívek, jak je znázorněno na obrázku. Pro pohon motoru jsou tedy zapotřebí čtyři obvody motor-řidič. Namísto použití IC ovladače krokového motoru k pohonu motoru jsou jako tranzistorové obvody připojeny čtyři tranzistory na 21, 22, 23 a 24 vývodech mikrokontroléru.
Pokud tranzistory zahájí vedení, vytvoří se kolem cívky magnetické pole, které způsobí rotaci motoru. Rychlost krokového motoru je přímo úměrná frekvenci vstupního impulzu. K pinu 18 a 19 je připojen krystalový oscilátor, který poskytuje hodinovou frekvenci mikrokontroléru asi 11,019 MHz.
Čas provedení jakékoli instrukce lze vypočítat pomocí následujícího vzorce
Čas = (((C * 12)) / f
Kde C = číslo cyklu
A F = krystalová frekvence
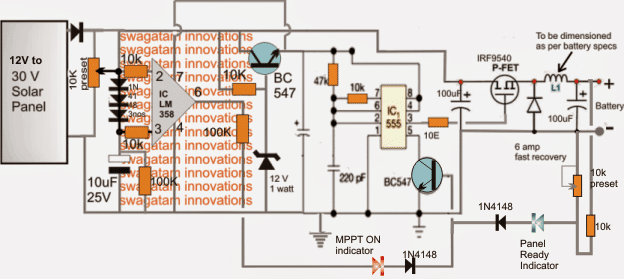
Níže je popsán jeden z aplikačně založených obvodů, který používá krokový motor pro otáčení solárního panelu.
Řízení krokového motoru pomocí naprogramovaného mikrokontroléru 8051
Projekt sledování solárních panelů Sun je určen k generování maximálního množství energie automatickým nastavením solárního panelu. V tomto projektu je krokový motor řízený naprogramovaným mikrokontrolérem rodiny 8051 propojen se solárním panelem, aby se tvář solárních panelů udržovala vždy kolmo ke slunci.

Ovládání krokového motoru pomocí mikrokontroléru od Edgefxkits.com
The naprogramovaný mikrokontrolér generuje v pravidelných intervalech stupňovité elektrické impulsy do krokového motoru pro otáčení solárního panelu. Řidič IC se používá k pohonu krokového motoru, protože regulátor není schopen zajistit energetické požadavky motoru.
Zanechte prosím své návrhy, zpětnou vazbu a dotazy zveřejněním komentářů v sekci komentářů níže. Uděláme maximum, abychom vám technicky pomohli ohledně tohoto článku a rozvoj elektrotechnických a elektronických projektů pomocí krokového motoru.