Příspěvek vysvětluje efektivní obvod měkkého startu motoru PWM, který lze použít k povolení těžkých motorů s měkkým startem, a tím zabránit tomu, aby zařízení odebíralo nebezpečné vysoké proudy.
Proč měkký start
Motory s vysokým příkonem, například motory čerpadel nebo jiné formy motorů pro těžký průmysl mají tendenci odebírat během svého počátečního zapnutí napájení obrovský proud, což zase ovlivňuje přidružené pojistky a spínače, což nepříznivě způsobí, že buď vybuchnou, nebo zhorší přesčas. Aby se situace napravila, je velmi důležitý obvod s pozvolným rozběhem.
V několika mých předchozích článcích jsme diskutovali o souvisejícím tématu, které se můžete komplexně naučit prostřednictvím následujících příspěvků:
Obvod pozvolného rozběhu pro motory čerpadel
Obvod pozvolného rozběhu pro ledničky
Ačkoli jsou výše uvedené návrhy velmi užitečné, lze je svým přístupem považovat za mírně low-tech.
V tomto článku uvidíme, jak může být proces implementován pomocí mnohem propracovanějšího řešení Motor na bázi PWM obvod ovladače soft startu.
Použití konceptu PWM
Myšlenkou je použít postupně se zvyšující PWM na motor pokaždé, když je zapnutý, tato akce umožňuje motoru dosáhnout lineárně rostoucí rychlosti z nuly na maximum ve stanoveném časovém období, které může být nastavitelné.

Poznámka: Použijte konfiguraci Darlington BC547 na pinu č. 5 IC2 namísto jediného BC547. Výsledkem bude efektivnější odezva ve srovnání s jedinou BC547
Příklad obvodu pro proměnný 48V ovladač motoru s pozvolným rozběhem

## PŘIPOJTE 1K Z PIN5 IC2 NA UZEMNĚNÍ, KTERÉ SE NESMÍ ZOBRAZIT VE VÝŠI NÁVRHU ##
Jak to funguje
S odkazem na obrázek výše je produkce lineárně se zvyšujícího PWM dosažena pomocí dvou 555 IC, nakonfigurovaných v jejich standardním režimu PWM.
Koncept jsem již podrobně rozebral v jednom z mých dřívějších článků vysvětlujících jak používat IC 555 pro generování PWM.
Jak je patrné z diagramu, konfigurace využívá dva 555 integrovaných obvodů, přičemž IC1 je zapojen jako nestabilní, zatímco IC2 jako komparátor.
IC1 generuje požadované hodinové signály na dané frekvenci (určené hodnotami R1 a C2), která se aplikuje na pin # 2 na IC2.
IC2 využívá hodinový signál ke generování trojúhelníkových vln na svém pinu č. 7, takže je lze srovnávat s potenciálem dostupným na jeho pinu č. 5 řídicího napětí.
Kolík # 5 získává požadované řídicí napětí prostřednictvím NPN fáze sledovače emitorů vyrobeno pomocí T2 a souvisejících komponent.
Když je napájení ZAPNUTO, je T2 napájen rampováním nebo postupně se zvyšujícím napětím na jeho základně přes R9 a v důsledku proporcionálního nabíjení C5.
Tento rampový potenciál je vhodně duplikován napříč emitorem T2 s ohledem na napájecí napětí na jeho kolektoru, což znamená, že základní data jsou převedena na postupně se zvyšující potenciál v rozsahu od nuly po téměř úroveň napájecího napětí.
Toto rampové napětí na pinu č. 5 IC 2 je okamžitě porovnáno s dostupnou trojúhelníkovou vlnou na pinu č. 7 IC2, která je převedena na lineárně se zvyšující PWM na pinu č. 3 IC2.
Proces lineárního zvyšování PWM pokračuje, dokud není C5 plně nabitý a základna T2 nedosáhne stabilní úrovně napětí.
Výše uvedený design se stará o generování PWM při každém zapnutí napájení.
Videoklip:
Následující video ukazuje výsledek praktického testu výše uvedeného obvodu PWM implementovaného na 24V DC motoru. Video ukazuje odezvu nastavení obvodu PWM obvodu na motoru a také další odezvu LED indikátoru baterie, zatímco motor je zapnutý a vypnutý .
Integrace nulového křížového regulátoru triaku
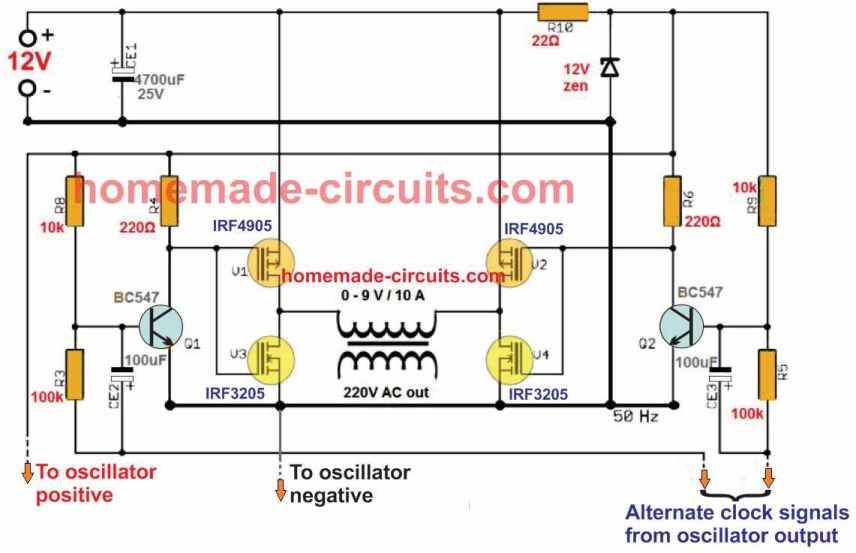
Za účelem implementace motoru PWM účinek obvodu měkkého startu , výstup z pinu č. 3 IC2 musí být aplikován na obvod budiče triaku, jak je znázorněno níže:

Výše uvedený obrázek ukazuje, jak může být pro těžké motory pro zamýšlený účel implementováno řízení PWM se zapnutým soft startem.
Na výše uvedeném obrázku vidíme, jak lze použít izolátory triakových ovladačů s detektorem průchodu nuly pro pohon motorů s lineárně se zvyšujícími PWM pro provedení efektu pozvolného rozběhu.
Výše uvedený koncept se efektivně postará o spouštění nadproudové situace na jednofázových motorech.
V případě, že se použije třífázový motor, lze pro implementaci navrhovaného třífázového pozvolného rozběhu na motorech použít následující myšlenku.

Předchozí: Indikátor LED nahoru / dolů pomocí LM3915 Další: Jak vytvořit obvod prevence štěkání psa pomocí vysokofrekvenčního odrazu