
Ve výpočtech může být rozhraní CAN sdílenou hranicí mezi dvěma samostatnými částmi informací o systémové konverzaci. Konverzaci lze provádět mezi počítačovým hardwarem, softwarem, lidmi, periferními zařízeními a jejich kombinací. Některá hardwarová zařízení počítače, jako je dotyková obrazovka, protože dotyková obrazovka může sdílet a přijímat informace prostřednictvím rozhraní, zatímco ostatní zařízení, jako je mikrofon, myš, jsou pouze jedním způsobem. Rozhraní jsou hlavně ve dvou typech například hardwarové rozhraní a softwarové rozhraní. Hardwarová rozhraní se používají v mnoha zařízeních, jako jsou vstupní, výstupní zařízení, sběrnice a paměťová zařízení. Toto rozhraní CAN lze definovat logickými signály. Softwarové rozhraní může být k dispozici v široké škále na různých úrovních. Operační systém může komunikovat s různými částmi hardwaru. Programy nebo aplikace na internetu OS možná bude muset komunikovat prostřednictvím streamů a v objektově orientovaném programování musí objekty v jakékoli aplikaci komunikovat pomocí metod.

MŮŽE AUTOBUS
Sběrnice CAN byla vyvinuta v roce 1983 ve společnosti Robert Bosch GmbH. Tento protokol byl vydán v roce 1986 na kongresu SAE (Society of Automobile Engineers) v Detroitu v Michiganu. První Protokol CAN byl vyroben společností Philips a Intel a uveden na trh v roce 1987. BMW řady 8 však bylo prvním vozidlem, které bylo vybaveno multiplexním elektroinstalačním systémem založeným na protokolu CAN.

MŮŽE AUTOBUS
Plná forma CAN je síťová oblast řadiče . Jedná se o jeden druh autobusu s vozidly, který je navržen hlavně pro různé účely zařízení a mikrokontroléry komunikovat mezi sebou bez hostitelského počítače. Tento protokol je založen na zprávě a je určen hlavně pro elektrické vedení v automobilech. Bosch vydal různé verze CAN a v roce 1991 byla vydána nejnovější CAN 2.0.
CAN se skládá ze dvou částí, zejména z části A a části B, kde část A je 11bitový identifikátor a je ve standardním formátu. Část B je 29bitový identifikátor a je v rozšířeném formátu. CAN, která používá 11bitové identifikátory, se nazývá AN 2.0A a CAN, která používá 29bitové identifikátory, se nazývá CAN 2.0B
Propojení CAN na USB
Rozhraní CAN na USB je jednoduché zařízení, které se používá ke sledování sběrnice CAN. Toto zařízení používá mikroprocesor NUC140LC1CN 32 K Cortexes-M0. Má periferní zařízení CAN i USB.
Hlavní rysy propojení CAN na USB jsou
- Návrh je velmi jednoduchý
- Dobře uzavřeno s protokol LAWICEL CANUSB
- Vystavuje se jako zařízení jako FTDI USB
- Podporuje CAN 2.0B 29bitové a CAN 2.0A 11bitové rámce
- Skládá se z vnitřní vyrovnávací paměti zpráv (FIFO CAN)
- Napájí se z USB portu
- K aktualizaci firmwaru se používá velkokapacitní paměťové zařízení (Flash-resident USB)
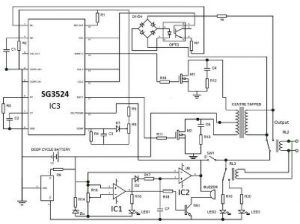
Schematický diagram
Konfigurace obvodu rozhraní CAN na USB je uvedena níže. Transformátor CAN se používá k umožnění interakce zařízení CAN NUC140 se sběrnicí CAN. Čip TJA1051T řeší účel z NXP. Mikroprocesor NUC140 je schopen pracovat s 5V napájecím zdrojem, není potřeba žádný další regulátor napětí 3,3V. Toto pohodlné uspořádání usnadňuje implementaci rozhraní CAN na USB.

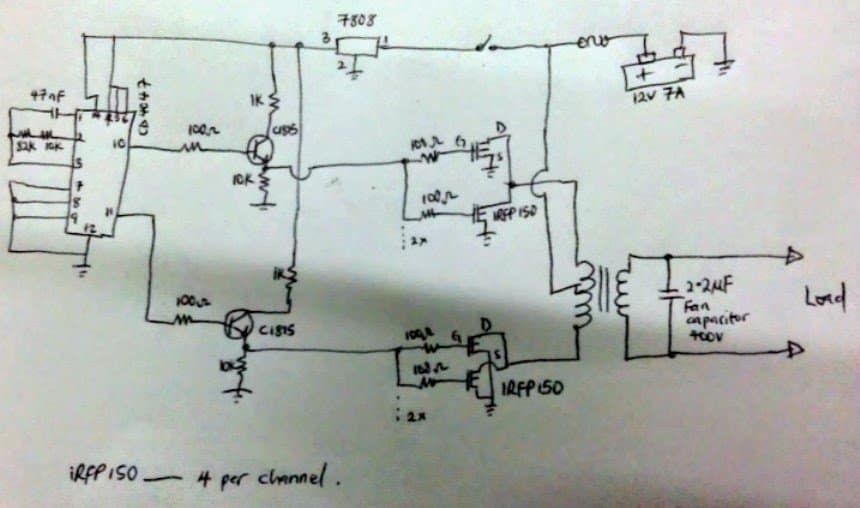
Schematický diagram
Obvod je postaven se třemi stavovými LED, konkrétně D1, D2 a D3.
- Zde stav diody D1 říká, že USB je připojeno k hostiteli
- Zde stav diody D2 říká, že aktivita sběrnice CAN
- Chyby sběrnice CAN lze indikovat diodou D3
Mikroprocesor NUC140 nemá integrovaný zavaděč a nejlepším způsobem programování je pouze programátor Nuvoton ICP a PAŽE Rozhraní SWD (Serial Wire Debug). Pokud je zavaděč dříve uložen s programem, mohl by být spuštěn. Připojení JP1 před napájením rozhraní spustí bootloader.
Zavaděč
Flash paměť mikroprocesoru NUC140LC1 je rozdělena do dvou částí. Provádějí kód uživatelského programu a zavaděč. Velikost zavaděče a prováděného uživatelského programu je 4K a 32 kB. Zde se zaváděcí zavaděč od společnosti Nuvoton používá k vytvoření plně funkčního zaváděcího zavaděče USB. Zavaděč se aktivuje připojením propojky JP1. Nakonec musí být v hostitelském systému souborů viditelná vyměnitelná jednotka o velikosti 32 kB. Stačí zkopírovat a vložit aktualizaci firmwaru CAN na USB do jednotky zavaděče. Odpojte kabel USB, odpojte propojku a znovu ji zapojte. Nyní by měla být spuštěna aktualizace nového firmwaru.

Zavaděč
Programování rozhraní CAN na USB a NuTiny-SDK-140
Programování mikroprocesoru NUC140 potřebuje programovací aplikaci Nuvoton ICP a programátor Nuvoton Nu-Link. Ale zde je NuTiny-SDK-140 (demo deska NUC140) k dispozici od společnosti Digi-Key. Skládá se ze dvou částí, jako jsou programátory Nu-Link, a části s čipem NUC140. Tato deska je dokonce perforovaná, aby oddělila část Nu-Link. Ve skutečnosti můžete toto zařízení navrhnout výhradně na demo desce NUC140, nezbytný bude pouze další čip CAN transceiveru.

Deska NUC140
Jedná se tedy o rozhraní CAN s USB zahrnuje, CAN bus, propojení CAN na USB, schematický diagram, zavaděč a mikroprocesor NUC140. Doufáme, že jste tomuto konceptu lépe porozuměli. V případě jakýchkoli dotazů týkajících se tohoto článku prosím uveďte své cenné návrhy komentářem v sekci komentářů níže. Zde je otázka, jaké jsou aplikace rozhraní CAN?
Fotografické kredity:
- Rozhraní CAN na USB saelig
- MŮŽE AUTOBUS canbuskit
- NUC140 instruktabilní





{kind=link}
{kind=link}
{kind=link}