
CAN nebo Controller Area Network je dvoudrátová vysokorychlostní sériová síťová technologie s polovičním duplexem. V zásadě se používá při komunikaci mezi různými zařízeními v oblasti s nízkým poloměrem, například v automobilu. Protokol CAN je protokol CSMA-CD / ASM nebo arbitráže detekující vícenásobné kolize detekce kolize v protokolu s prioritou zprávy. CSMA zajišťuje, že každý uzel musí před odesláním jakékoli zprávy počkat na dané období. Detekce kolize zajišťuje, že kolizi nedojde výběrem zpráv na základě jejich předepsané priority.
Poskytuje rychlost signalizace od 125 kb / s do 1 Mb / s. Poskytuje 2048 různých identifikátorů zpráv.
Jedná se o normu ISO-11898 a využívá 7vrstvý model propojení otevřených systémů.
Dějiny:
Byl vyvinut Robertem Boschem v roce 1982 a oficiálně vydán společností Detroit's Society of Automotive Engineers v roce 1986. První vůz integrující sběrnici CAN vyrobila společnost Mercedes Benz v roce 1992.
Architektura ISO 11898:

Zdroj obrázku - theremino
Vrstvená architektura se skládá ze tří vrstev
- Aplikační vrstva : Interaguje s operačním systémem nebo aplikací zařízení CAN.
- Vrstva datového spojení : Spojuje skutečná data s protokolem, pokud jde o odesílání, přijímání a ověřování dat.
- Fyzická vrstva : Představuje skutečný hardware.
Standardní rámec CAN se skládá z následujících bitů:
 Standardní rámec CAN se skládá z následujících bitů:
Standardní rámec CAN se skládá z následujících bitů:
- SOF - začátek Fr. já. Zpráva začíná od tohoto bodu.
- Identifikovat : Rozhoduje o prioritě zprávy. Čím nižší je binární hodnota, tím vyšší je priorita. Je to 11 bitů.
- RTR - Žádost o dálkový přenos. Je dominantní, když jsou požadovány informace z jiného uzlu. Každý uzel obdrží požadavek, ale požadovaným uzlem je pouze ten uzel, jehož identifikátor odpovídá identifikátoru zprávy. Každý uzel také obdrží odpověď. Z
- TADY - Single Identification Extension. Pokud je dominantní, znamená to, že se přenáší standardní identifikátor CAN bez přípony.
- R0 - vyhrazený bit.
- DLC - Kód délky dat. Definuje délku odesílaných dat. Je to 4 bitové
- Data - Lze přenášet až 64 bitů dat.
- CRC - Kontrola cyklické redundance. Obsahuje kontrolní součet (počet přenesených bitů) předchozích dat aplikace pro detekci chyb.
- BĚDA - Potvrdit. Je to na 2 bity. Je dominantní, pokud je přijata přesná zpráva.
- EOF - konec rámu. Označí konec rámečku plechovky a zakáže bitové plnění.
- IFS - Prostor mezi snímky. Obsahuje čas potřebný řadičem k přesunutí správně přijatého rámce do správné polohy.
5 různých typů zpráv je:
- Datový rámec : Skládá se z libovolného pole, datového pole, pole CRC a potvrzovacích polí.
- Vzdálený rámeček : Žádá o přenos dat z jiného uzlu. Zde je bit RTR recesivní.
- Chybný snímek : Přenáší se, když je zjištěna chyba.
- Přetížení rámu : Používá se k zajištění zpoždění mezi zprávami. Vysílá se, když jsou uzly příliš zaneprázdněné.
- Platný rámeček : Zpráva je platná, pokud je pole EOF recesivní. Jinak se zpráva přenáší znovu.
CAN fyzická vrstva:
Sběrnice CAN

Zdroj obrázku - digital.ni
Skládá se z dvouvodičové sériové linky - CAN_H a CAN_L a jejich vzájemné napěťové úrovně určují, zda se přenáší 1 nebo 0. Toto je diferenciální signalizace. Proud tekoucí v každém signálním vedení je stejný, ale opačný ve směru, což má za následek efekt rušení pole, který je klíčem k nízkým emisím hluku. Tím je zajištěna vyvážená diferenciální signalizace, která snižuje vazbu šumu a umožňuje vysokou rychlost přenosu po vodičích. Dráty jsou obvykle kroucené dvoulinky s délkou sběrnice 40 ma maximálně 30 uzly. Jedná se o stíněný nebo nestíněný kabel s charakteristickou impedancí 120 Ohmů.
MŮŽE VYSÍLAČ:

CAN pro vozidla od Huga Provenchera. Dva vodiče CANH a CANL jsou normálně 2,5 V určené dvěma tranzistory a zdrojem napětí 2,5 V. V zásadě by měl být rozdíl mezi těmito dvěma vodiči vždy 0. Ovladač ovladače určuje napětí přivedené na vodiče CANH a CANL. Když jsou oba tranzistory vodivé, pokles napětí na 1Svatýtranzistor a dioda je 1,5 V, takže vodič CANH může vytáhnout až 3,5 V. Pokles napětí na 2ndtranzistor a dioda je 1V, což způsobí, že vodič CANL se vytáhne na 1,5V. Diody se používají k ochraně vysokého napětí. Přijímač je diskriminační obvod, který poskytuje výstup 1, když jsou dva vstupy CANH a CANL stejné, a výstup 0, pokud jsou dva vstupy odlišné. Dominantní blok TXD se používá k ochraně proti zemnímu spojení a blok tepelného vypnutí deaktivuje řízení ovladače, pokud se diody a tranzistory přehřejí.
Výhody CAN:
- Snižuje zapojení, protože se jedná o distribuované řízení, což zajišťuje zvýšení výkonu systému.
- Mnoho výrobců čipů CAN poskytlo vrstvu datového spojení a fyzickou vrstvu propojenou s čipem a vývojář softwaru potřebuje pouze vývoj kódování aplikace.
- Poskytuje schopnost pracovat v různých elektrických prostředích a zajišťuje přenos bez šumu.
- Dopravní zácpy jsou eliminovány, protože zprávy jsou přenášeny na základě jejich priority a umožňuje celé síti vyhovět časovým omezením.
- Poskytuje bezchybný přenos, protože každý uzel může během přenosu zprávy zkontrolovat chyby a odeslat chybový rámec.
CAN Pracovní příklad:
Řadič Area Network má rozsáhlé aplikace v průmyslových i ve vozidlech. Jedna z hlavních aplikací je zapojena do komunikace mezi různými zařízeními ve vozidle. Další může být mezi různými mikrokontroléry, předpokládejme, že detekují heslo, slouží ke splnění jakýchkoli požadavků, jako je otevření zamčených dveří pomocí hesla nebo zapnutí žárovky atd.

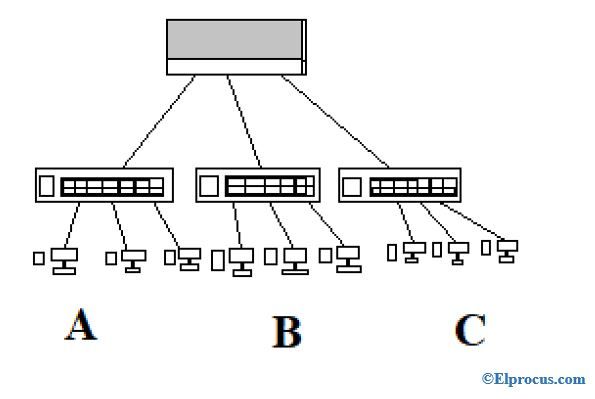
Obvod síťové oblasti řadiče
Základní aplikace se skládá ze 3 mikrokontrolérů, které spolu komunikují pomocí dvou vodičů jako v síti CAN. 1Svatýmikrokontrolér je propojen s klávesnicí, 2nds LCD a třetí s bzučákem a relé ovládajícím lampu. Když je na klávesnici zadáno heslo, 2ndmikrokontrolér funguje jako přijímač a přijímá přenášenou zprávu kousek po kousku z 1Svatývysílač a zobrazí zprávu na LCD. Když je přenesena celá zpráva, 2ndmikrokontrolér provede ověření a pokud je heslo špatné, vyšle signál do 3rdmikrokontrolér, který zasílá bzučák, je zapnut s tímto signálem. Pokud je heslo správné, 3rdmikrokontrolér zapne relé, které následně zapne lampu.






{kind=link}
{kind=link}